

中大新聞中心
中大研發全球首創「抗菌膜」液態機械人 精準清除植入物感染
香港中文大學(中大)聯同國際研究團隊於微型醫療機械人領域取得嶄新突破。由中大工程學院機械與自動化工程學系張立教授領導的團隊,聯同新加坡南洋理工大學、德國馬普智能系統研究所等國際團隊,成功研發全球首款「抗菌膜」磁控液態機械人,新功能包括以適應不同操作環境的「黏彈性」及三重協同殺菌機制,協助治療菌膜感染開拓全新方向。有關成果已刊載於國際研究期刊《科學進展》(Science Advances)。
全球衞生威脅:菌膜感染
世界衞生組織(世衞)在2019年將抗菌素耐藥性定為人類面臨的十大全球公共衞生威脅之一,每年在全球造成近五百萬人死亡。抗菌素耐藥性除了與耐藥菌株的出現有關,也有很大原因是細菌粘附在物體表面結合分泌物質形成菌膜屏障引起。人體內的醫療植入物表面因缺乏免疫保護,極容易發生菌膜感染。傳統的抗生素治療難以穿透菌膜屏障,而以手術移除植入物則有機會造成二次創傷。
團隊早前研發了磁性微型機械人用於清除植入物菌膜感染,不過經研究發現,磁性水凝膠機械人雖可在簡單形狀管道內行動,卻難以適應複雜表面(如醫療支架、網片等),未能徹底清除菌膜。有見及此,團隊另闢蹊徑,研發出全球首創的「抗菌膜」磁控液態機械人。
兩大新增功能 協助治療菌膜感染
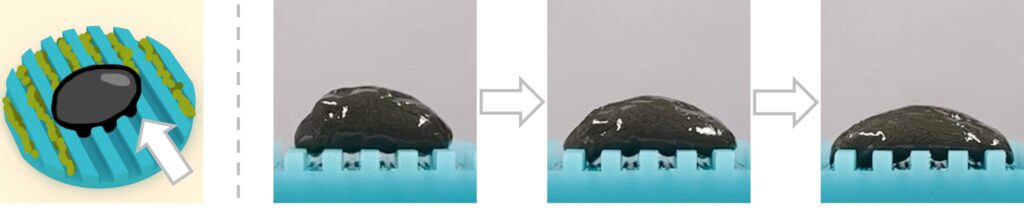
機械人由動態交聯磁性水凝膠組成,具備獨特的黏彈性,有助清除人體內的菌膜。張立教授解釋:「透過精準調控外部磁場,可啟動機械人不同行為模式。例如,在彈性模式下,機械人可在病人體內進行旋轉、翻滾及跨越障礙等動作;在液態模式下,則可變成液態化的機械人,深入病人體內縫隙清除頑固菌膜。」
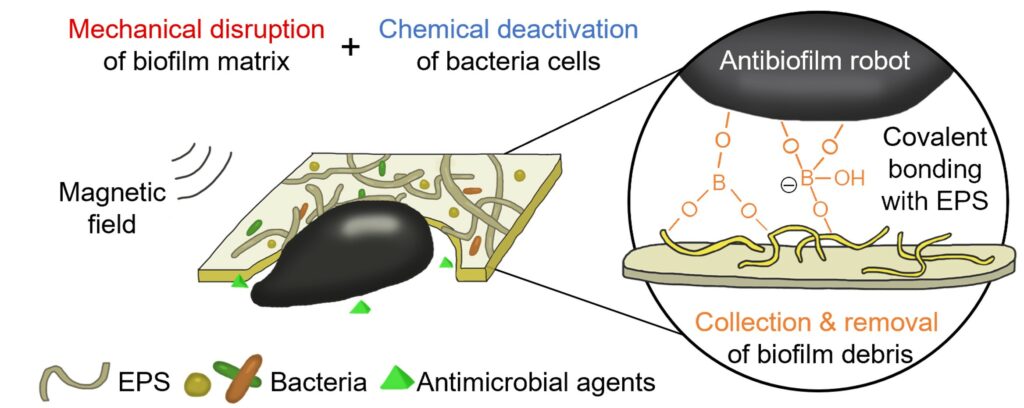
團隊亦為機械人設計三重協同殺菌機制,包含物理破壞菌膜:透過機械人運動傳導磁場,破壞菌膜的物理結構,削弱其保護作用;化學細菌滅活:機械人會針對浮游細菌釋放抗菌劑;智能吸附:最終機器人會菌膜碎片結合,防止重複感染。
實測成效達87% 未來冀推進臨床應用
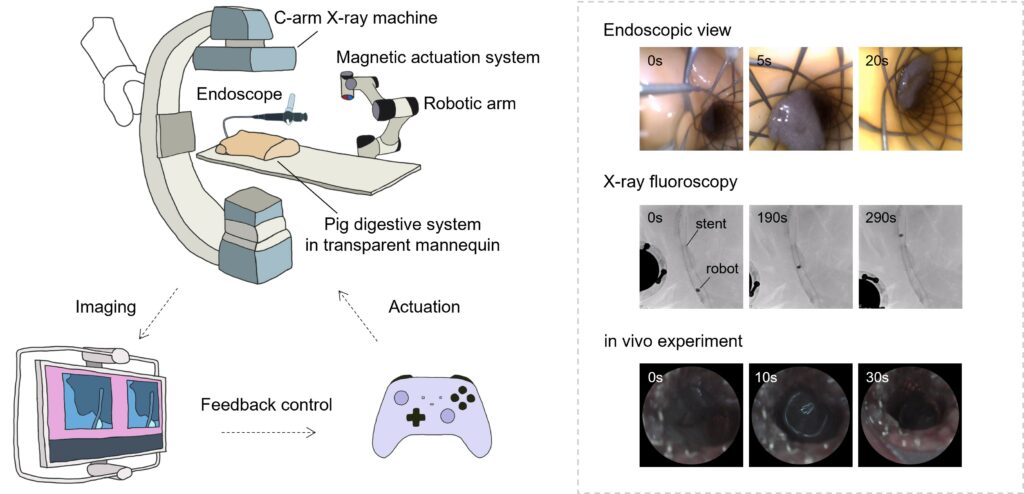
液態機械人的在治療植入物感染的測試展現出卓越性能。治療疝氣的三維醫療貼片經機械人處理後,菌膜減少84%;膽道支架上的間隙,經機械人清除菌膜後,87%細菌失去活性。張立教授補充:「團隊首創利用內窺鏡與X光的雙導航技術,成功操控機械人穿越豬膽管內的金屬支架。另外,團隊亦利用老鼠作對照實驗,發現植入物受感染的老鼠經機械人治療後,在12天內完全恢復體重,發炎反應更降低了40%。」
張立教授指:「傳統微型機械人通常要在力量與靈活性間作取捨,此技術首次實現了兩者兼備的特性。」他續指,團隊正與新加坡南洋理工大學李光前醫學院合作開發升級版的抗菌膜機械人,下一步團隊將進行大型動物模型測試,並計劃推行人體臨床試驗。
論文共同作者、新加坡南洋理工大學李光前醫學院沈祖堯教授表示:「膽道菌膜感染一直是我重點研究課題。當患者膽道被固化感染組織完全堵塞時,常規療法難以根治。是次液態機械人研究提供新思路,期望未來可搭載新型抗菌劑,並於臨床環境驗證成效。」

中大機械與自動化工程學系張立教授帶領的合作研究團隊,成功研發全球首款「抗菌膜」磁控液態機械人,為治療植入物感染開拓全新方向。
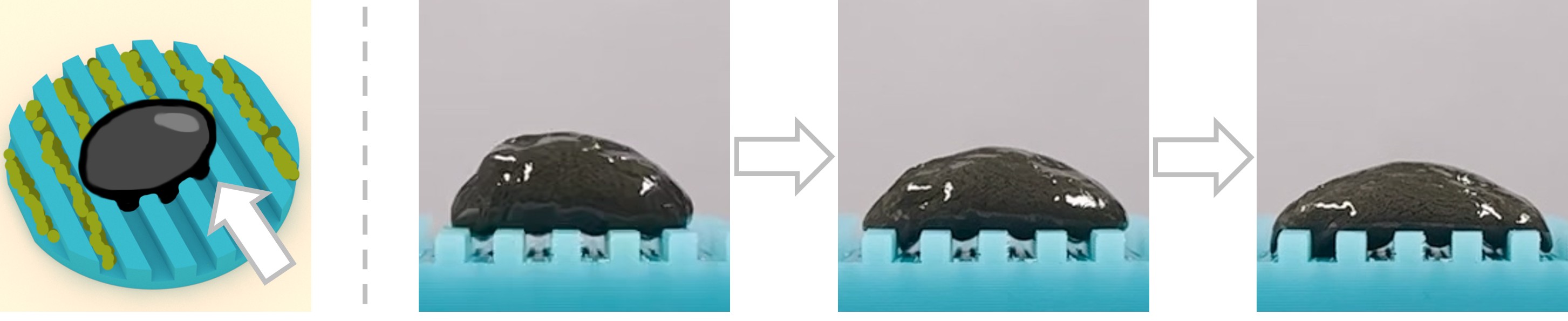
「抗菌膜」機械人可變成液態模式,深入病人體內縫隙清除頑固菌膜。
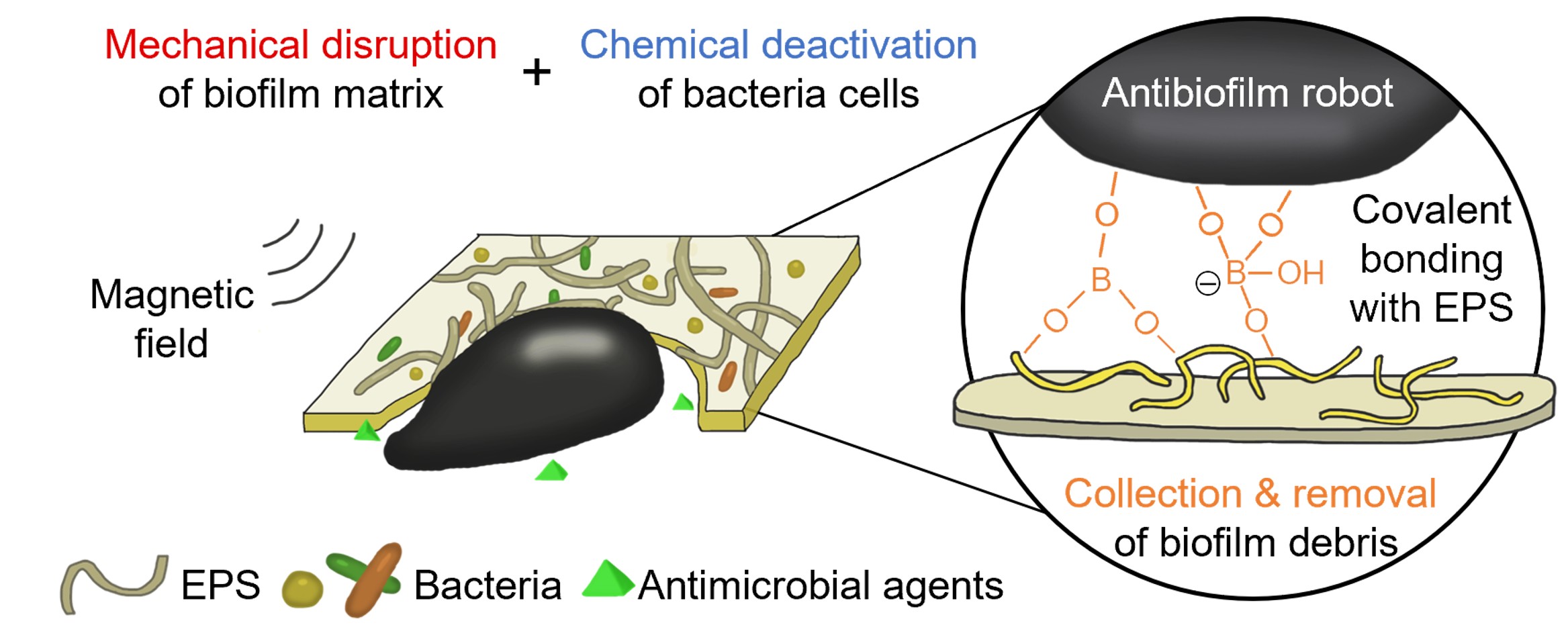
研究團隊首創三重協同抗菌膜機制,包括物理破壞菌膜、化學細菌滅活,及智能吸附,以防止重覆感染。
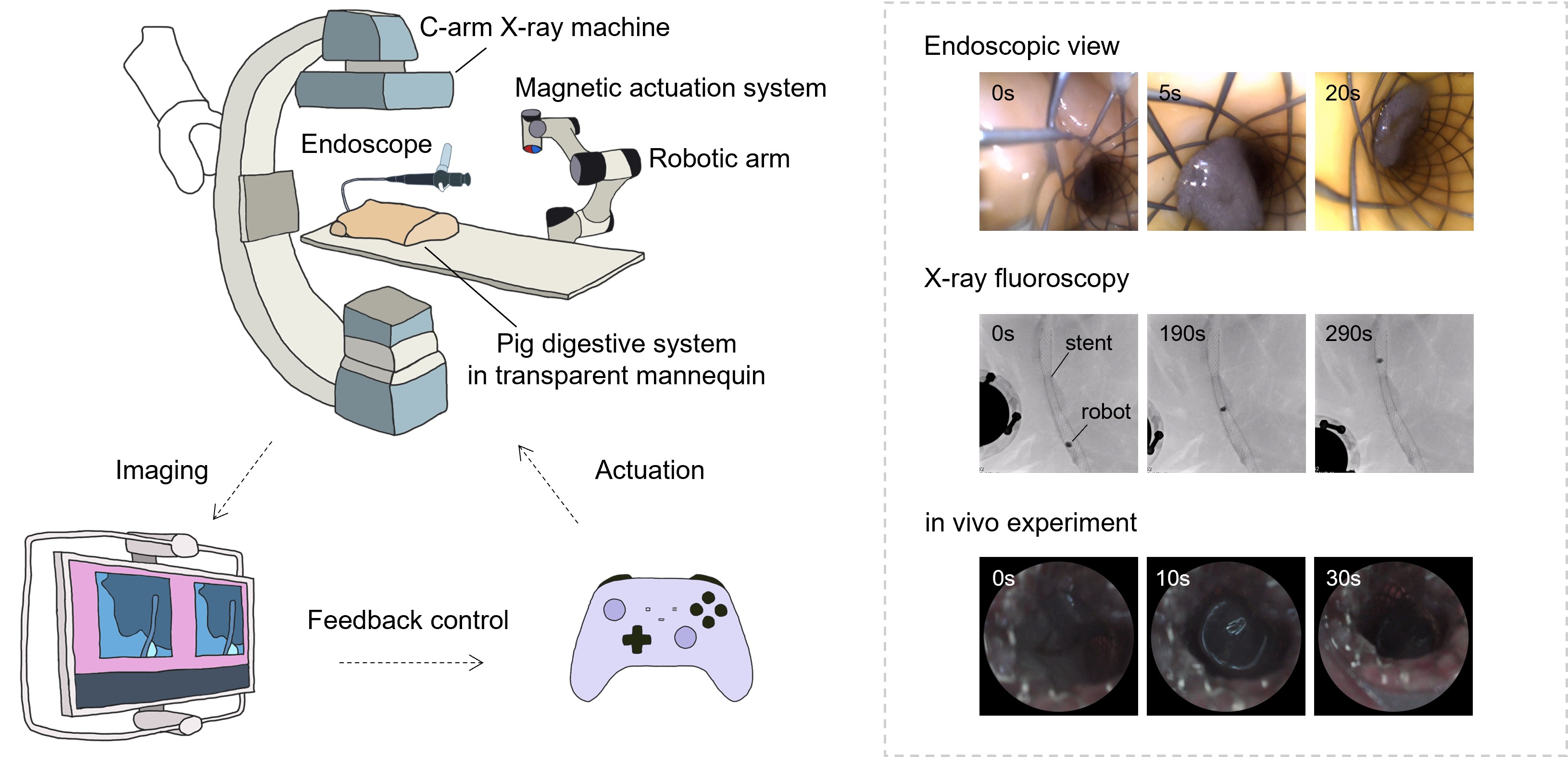
微型機器人手術平台用以控制和導航機器人。