

中大新聞中心
中大成功研發可在體內快速傳輸的「生物合成軟體微型機械人」
突破現有儀器限制 深入狹窄腔道治療消化道疾病
由香港中文大學(中大)機械與自動化工程學系張立教授、中大醫學院沈祖堯教授及趙偉仁教授領導的跨學科研究團隊,近日研發了一款配備內鏡輔助磁力導航系統的「生物合成軟體微型機械人」。這款微型醫療機械人,配合實時成像導航技術,能在人體內快速傳輸,有望用於治療迂迴曲折管道內的疾病,特別是針對一些常規醫療儀器未可觸及的部位,進行微創治療。
Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging,
Science Robotics, Vol. 6, Issue 52, eabd2813, 2021
微型醫療機械人於人體內應用的挑戰
微型醫療機械人要於人體內狹小迂迴的管道內準確移動,仍需解決多方面的挑戰,包括:要具備不同功能、有足夠安全性、可以適應動態生理環境及不同的生理障礙,並要配合實時成像技術以方便控制。
輔以內鏡磁力驅動系統的「生物合成軟體微型機械人」用於腔道內傳輸及實時成像
中大的研究團隊研發了一種以幹細胞為基礎的軟體磁性幹細胞球微型機械人,簡稱MSCSMs,主要由大量(約佔98%)幹細胞及微量磁性粒子(約佔2%)組成。該軟體微型機械人的柔軟度有如人體大腦組織,於磁場驅動下,它們不但有快速反應及準確鎖定目標的能力,更可於傳輸過程中變形,以通過體內複雜兼狹窄的管道。由於微型機械人使用的幹細胞源自於宿主,這將大大減低免疫系統的排斥反應。此外,該軟體微型機械人能夠通過各種臨床成像技術作實時的體內追蹤,包括內鏡和超聲波等廣泛在腔內手術中採用的技術。
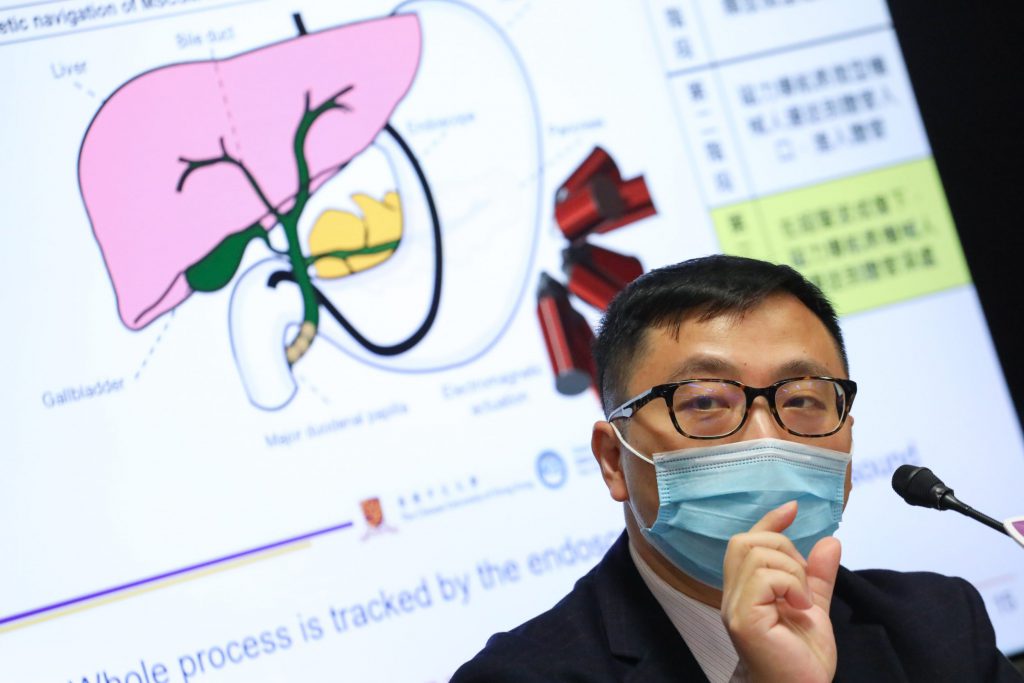
另一方面,為了令軟體微型機械人能夠快速進入體內深處的狹窄空間,團隊開發了一個結合了臨床成像工具的機械人集成平台 — 雙模成像內鏡輔助磁驅動系統(EMADIS)。系統中的內鏡為MSCSMs提供了一個「快速通道」,既可避免機械人直接接觸人體內複雜的流體環境,亦可讓它們快速穿過各種器官或組織的生物屏障。透過內鏡將MSCSMs送入人體,之後再利用磁場驅動精準地運送它們到目標位置。傳輸過程由內鏡(在可見的區域)和超聲波成像(內鏡不可到達的區域)作追蹤和監察。通過這種方式,EMADIS能快速並精準地將MSCSMs運送到微小和曲折的腔內管道作介入治療,特別是在一些傳統內鏡和醫療機械人無法到達、甚至無法觀察的部位。
中大榮休講座教授、新加坡南洋理工大學高級副校長(健康與生命科學)及李光前醫學院院長沈祖堯教授表示:「是次研發的技術,能把內鏡可覆蓋範圍延伸至膽管、胰管、支氣管中的較小分支,甚至是泌尿系統較小的分支,例如腎盞和前列腺等,這些器官是不論多麼纖細靈活的傳統內鏡,以往都無法觸及的。借助磁性導航,生物合成軟體微型機械人可以提供前所未見的診斷和治療機會,相信這項技術有巨大的臨床應用潛力,並能安全應用。我們相當期待下一步開展動物研究以證明該技術的安全性,以及透過臨床實驗驗證其功效。」
中大醫學院周毓浩創新醫學技術中心主任、中大賽馬會微創醫療技術培訓中心主任趙偉仁教授指出:「這項研究成功結合了有限制的內鏡與無限制的微型機械人,大大擴展了系統的治療範圍;微型機械人亦實現了精準、快速和長距離的傳輸。另外,生物合成幹細胞微型機械人可以攜帶大量的幹細胞作標靶治療,並且在消化道疾病(例如膽總管結石或肝內膽管結石、炎症性腸病和良性膽管狹窄)的治療方面具有巨大潛力。」
中大機械與自動化工程學系副教授張立教授指出:「在是次聯合中大醫學院的合作中,我們提出了一種創新策略,並建立了一個微型機械人平台,以應對微納米醫療機械人領域中的多種關鍵挑戰,例如:如何減低微型機械人的潛在生物安全問題,如何能夠令微型機械人高度適應體內生理環境,以及如何於數分鐘內精確地和在實時追蹤下將大量的微納米機械人傳遞到體內深處。我非常感謝醫學院的夥伴在合作過程中為我和我的團隊提供了很多建議和支援,對於是次出色的研究成果相當重要。」
目前,研究團隊正在緊密合作,將是次的成果轉化為多種體內應用,證明這個微型機械人平台的醫療價值。隨著內鏡技術和微型機械人技術不斷發展,研究團隊預期這兩方面的結合將帶來一個極具潛力的治療系統。此系統將具備長距離工作、短時間和高傳送效率、多樣功能性並具有高臨床價值的優點。
此研究獲香港研究資助局(RGC)、創新科技署(ITC)、中大周毓浩創新醫學技術中心以及中大天石機器人研究所支持。
研究論文全文:
Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging
https://robotics.sciencemag.org/content/6/52/eabd2813
影片來源:Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging, Science Robotics, Vol. 6, Issue 52, eabd2813, 2021




中大跨學科研究團隊研發了一款配備內鏡輔助磁力導航系統的「生物合成軟體微型機械人」,配合實時成像導航技術,能在人體內快速傳輸,有望用於治療迂迴曲折管道內的疾病。
左起:中大機械與自動化工程學系副教授張立教授、中大醫學院周毓浩創新醫學技術中心主任趙偉仁教授,以及中大榮休講座教授沈祖堯教授(螢幕上顯示Zoom直播畫面)。

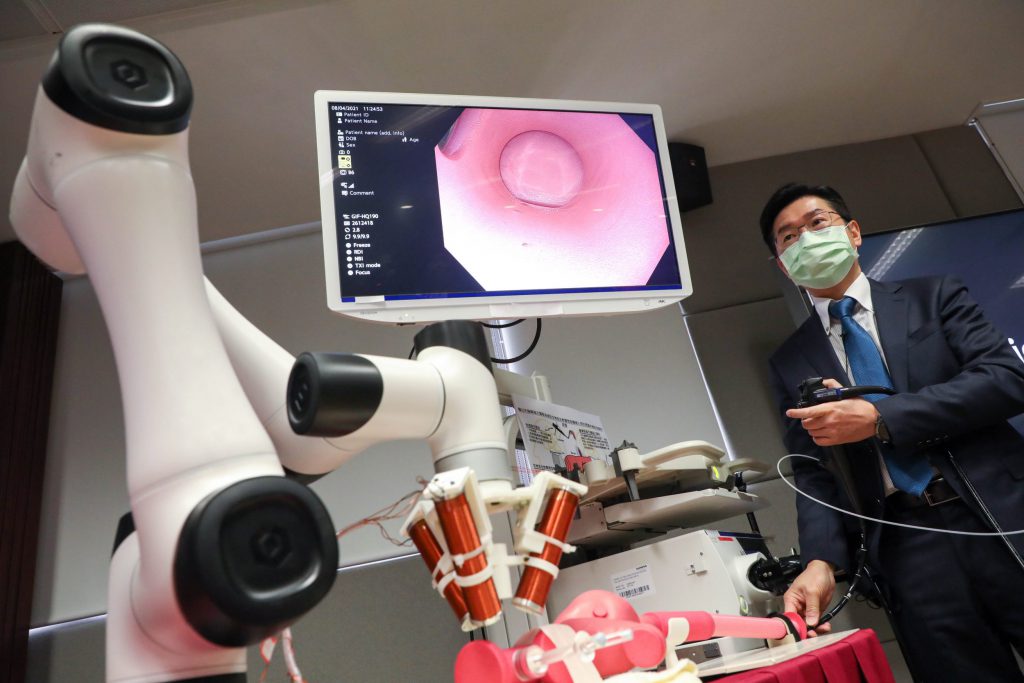
趙偉仁教授利用人體模型示範透過內鏡將微型機械人送入狹窄的消化道內,再利用磁場驅動精準地運送它們到目標位置。
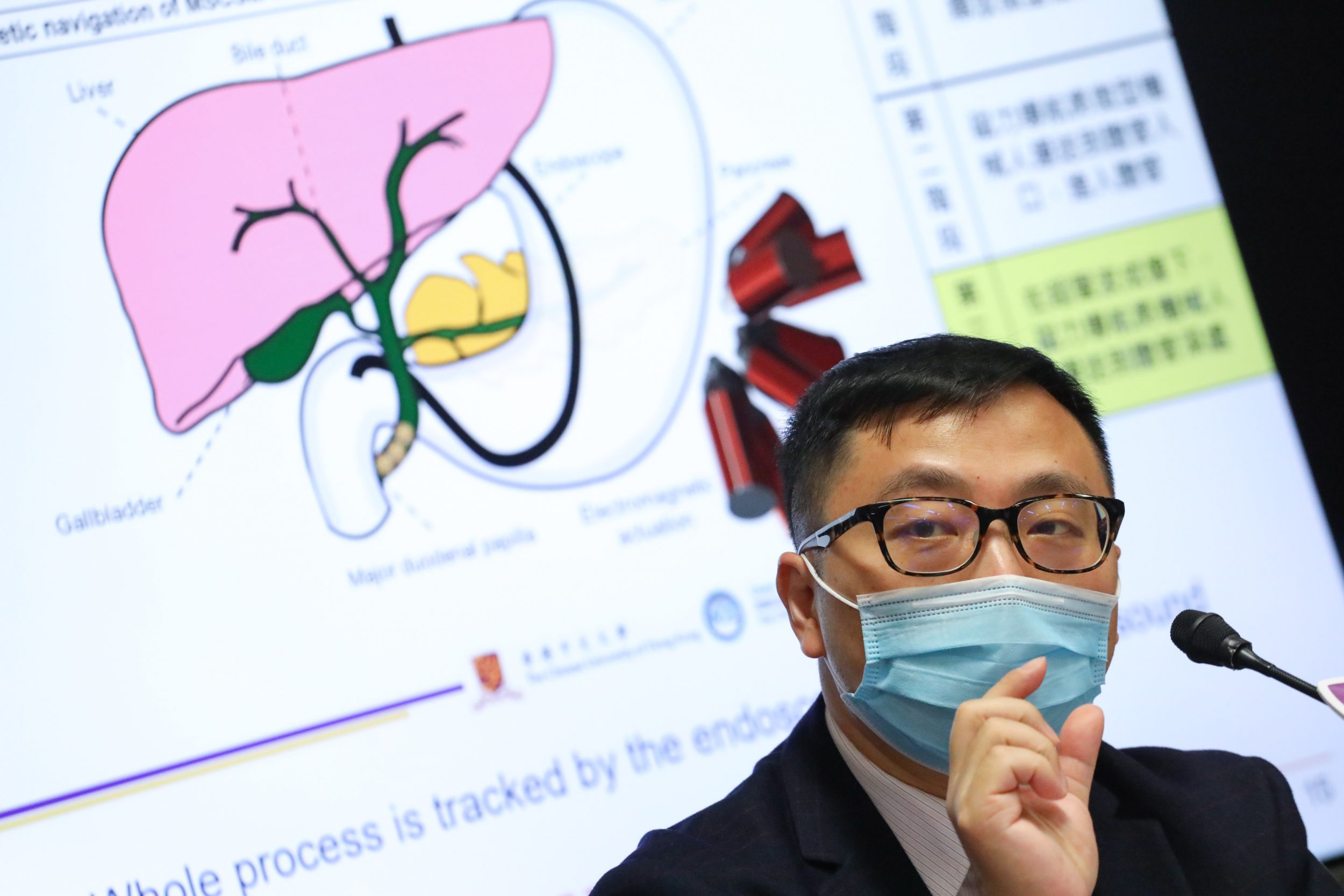
張立教授表示,微型機械人能把內鏡可覆蓋範圍延伸至傳統儀器無法觸及的位置,例如膽管和胰管等。

沈祖堯教授相信微型機械人技術有巨大的臨床應用潛力,團隊下一步將開展動物研究以證明該技術的安全性,以及透過臨床研究驗證其功效。

中大跨學科研究團隊研發的「生物合成軟體微型機械人」(紅箭咀示),由大量(約佔98%)幹細胞及微量磁性粒子(約佔2%)組成,每個機械人直徑僅100至500微米。