

中大新聞中心
中大發明爬樹機械人保養樹木 提高林業效率
香港中文大學(中大)副校長、機械與自動化工程學講座教授兼現代機器人實驗室主任徐揚生教授及其指導的博士研究生林天麟博士成功研發具360度全方位活動能力的爬樹機械人(Treebot),以協助並代替工人爬到樹木上進行檢查、保養及病蟲害防治等林業工作,可幫助減低工人受傷的風險,提高工作效率,並減少城市樹木倒塌的危機。此外,爬樹機械人亦可用於監察樹上生態以進行科學研究,用途廣泛。
爬樹機械人主要由一個獨創的高自由度移動裝置及一對機械抓組成,組件結構非常輕巧。該移動裝置不但能夠高度伸縮,而且還能多向彎曲,比較其他只能垂直向上爬行的爬樹機械人,這項嶄新發明能在不規則的樹幹和枝椏之間自由走動,到達樹上不同位置,靈活度和機動性能大大提升。而機械抓則採用了精巧的單驅動及自適應設計,能牢固地抓在各種不同材質、型狀及粗細的樹幹上。靜態時,機械人更能以零功耗牢固地抓在樹幹上,節省電池使用量。爬樹機械人體積小巧,重量只有600克,其負載能力卻高達1.75千克,幾乎是機械人自重的三倍,足以配備一定重量的儀器。
爬樹機械人亦配備傳感器,可以探索四周的環境,得以自主地在未知的環境中行走。一般機械人多採用視覺傳感器,以接收豐富的環境資訊。然而,這種傳感器卻很容易受戶外光線變化所影響。事實上,自然界有很多生物皆不需要依賴視覺資訊亦能行動自如,例如尺蠖就是憑觸覺在樹上四處行走。儘管觸覺傳感器獲得的信息遜於視覺傳感器,但卻更為可靠,不會受環境變化所影響。因此,爬樹機械人亦採用了觸覺傳感器對環境進行探索及重建,從而自主設定最佳前進路線。
徐揚生教授為著名的機器人與智能控制專家。他長期從事各種機器人與智能控制研究,在空間機器人的設計、控制及動力學研究,以及無重力地面試驗設施的研製等方面作出了重要貢獻。他提出並參與了有關航天智能系統的研製,對動態穩定系統的控制、人類控制策略的自動建模、穿戴式智能人機界面,以及全方位混合動力汽車等範疇進行了深入研究和系統開發。他發表了四部專著、一部編著、三百多篇國際期刊論文和國際學術會議論文,並獲選為國際電機及電子工程師學會(IEEE)院士、香港工程科學院院士、中國工程院院士、國際歐亞科學院院士,以及國際宇航科學院通訊院士。
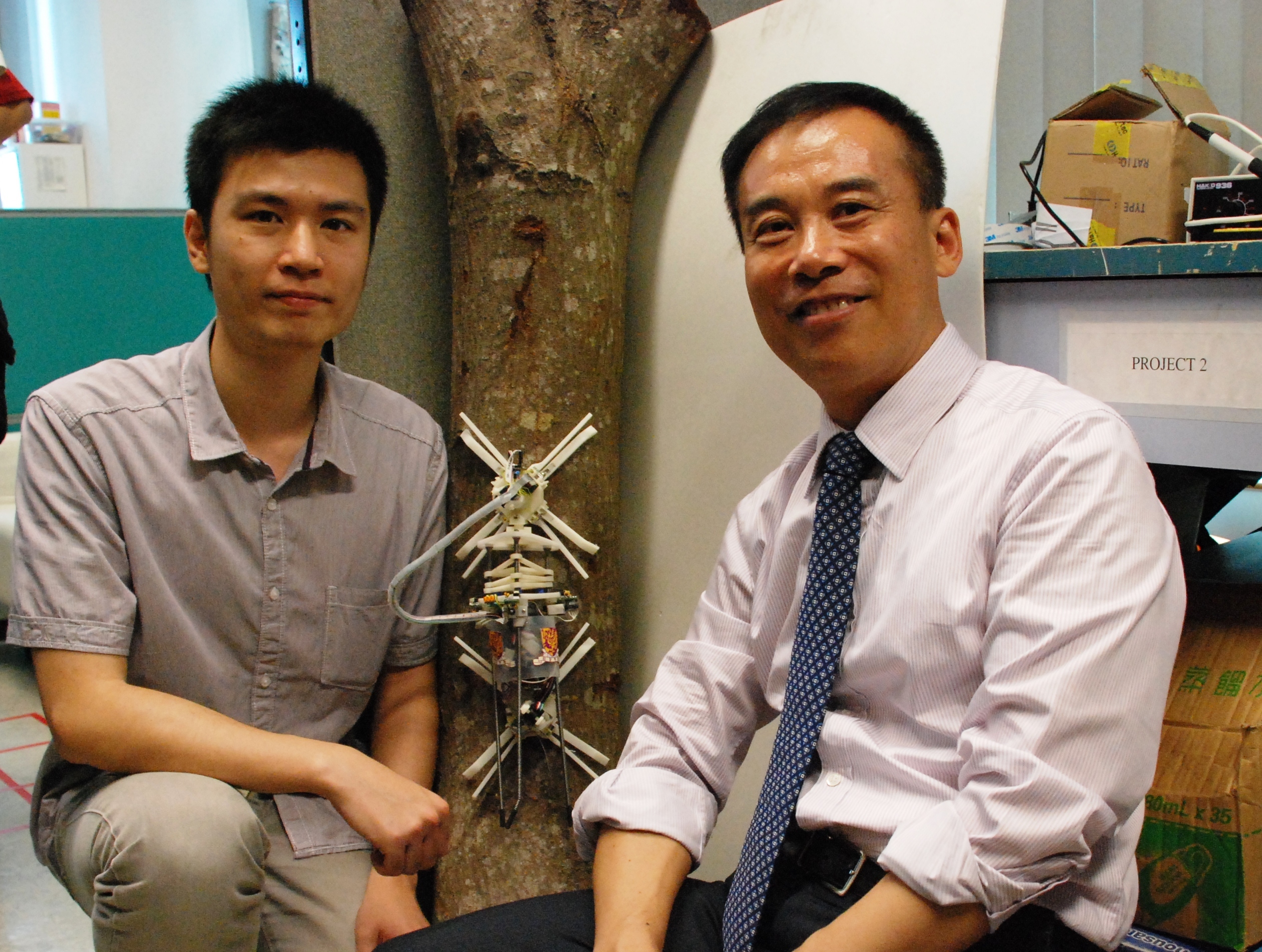
徐揚生教授(右)與林天麟博士於現代機器人實驗室展示爬樹機械人「爬樹寶寶」
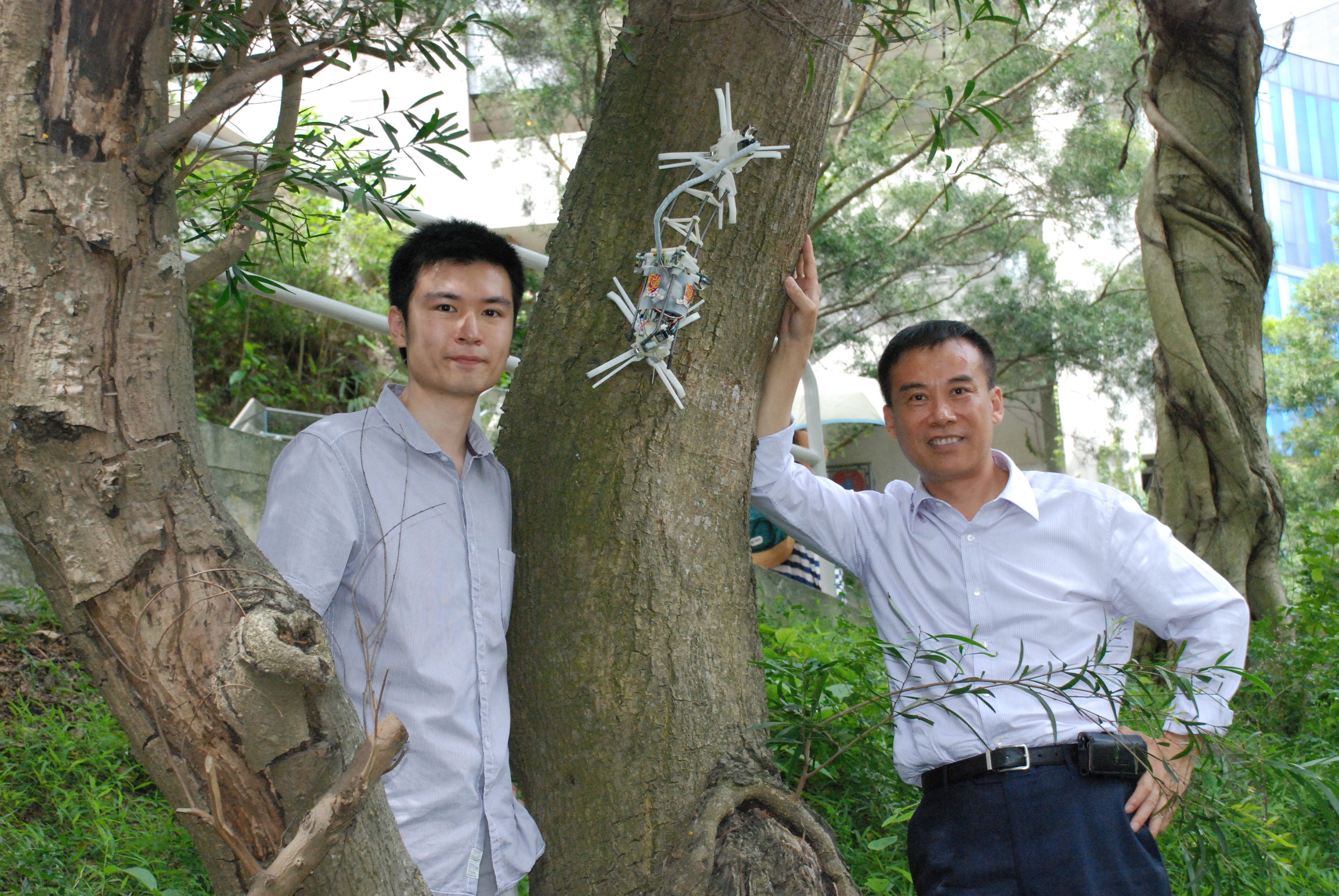
徐揚生教授(右)與林天麟博士

中大爬樹機械人「爬樹寶寶」