

中大新聞中心
中大发明爬树机械人保养树木 提高林业效率
香港中文大学(中大)副校长、机械与自动化工程学讲座教授兼现代机器人实验室主任徐扬生教授及其指导的博士研究生林天麟博士成功研发具360度全方位活动能力的爬树机械人(Treebot),以协助并代替工人爬到树木上进行检查、保养及病虫害防治等林业工作,可帮助减低工人受伤的风险,提高工作效率,并减少城市树木倒塌的危机。此外,爬树机械人亦可用于监察树上生态以进行科学研究,用途广泛。
爬树机械人主要由一个独创的高自由度移动装置及一对机械抓组成,组件结构非常轻巧。该移动装置不但能够高度伸缩,而且还能多向弯曲,比较其他只能垂直向上爬行的爬树机械人,这项崭新发明能在不规则的树干和枝桠之间自由走动,到达树上不同位置,灵活度和机动性能大大提升。而机械抓则采用了精巧的单驱动及自适应设计,能牢固地抓在各种不同材质、型状及粗细的树干上。静态时,机械人更能以零功耗牢固地抓在树干上,节省电池使用量。爬树机械人体积小巧,重量只有600克,其负载能力却高达1.75千克,几乎是机械人自重的三倍,足以配备一定重量的仪器。
爬树机械人亦配备传感器,可以探索四周的环境,得以自主地在未知的环境中行走。一般机械人多采用视觉传感器,以接收丰富的环境资讯。然而,这种传感器却很容易受户外光线变化所影响。事实上,自然界有很多生物皆不需要依赖视觉资讯亦能行动自如,例如尺蠖就是凭触觉在树上四处行走。尽管触觉传感器获得的信息逊于视觉传感器,但却更为可靠,不会受环境变化所影响。因此,爬树机械人亦采用了触觉传感器对环境进行探索及重建,从而自主设定最佳前进路线。
徐扬生教授为着名的机器人与智能控制专家。他长期从事各种机器人与智能控制研究,在空间机器人的设计、控制及动力学研究,以及无重力地面试验设施的研制等方面作出了重要贡献。他提出并参与了有关航天智能系统的研制,对动态稳定系统的控制、人类控制策略的自动建模、穿戴式智能人机界面,以及全方位混合动力汽车等范畴进行了深入研究和系统开发。他发表了四部专着、一部编着、三百多篇国际期刊论文和国际学术会议论文,并获选为国际电机及电子工程师学会(IEEE)院士、香港工程科学院院士、中国工程院院士、国际欧亚科学院院士,以及国际宇航科学院通讯院士。
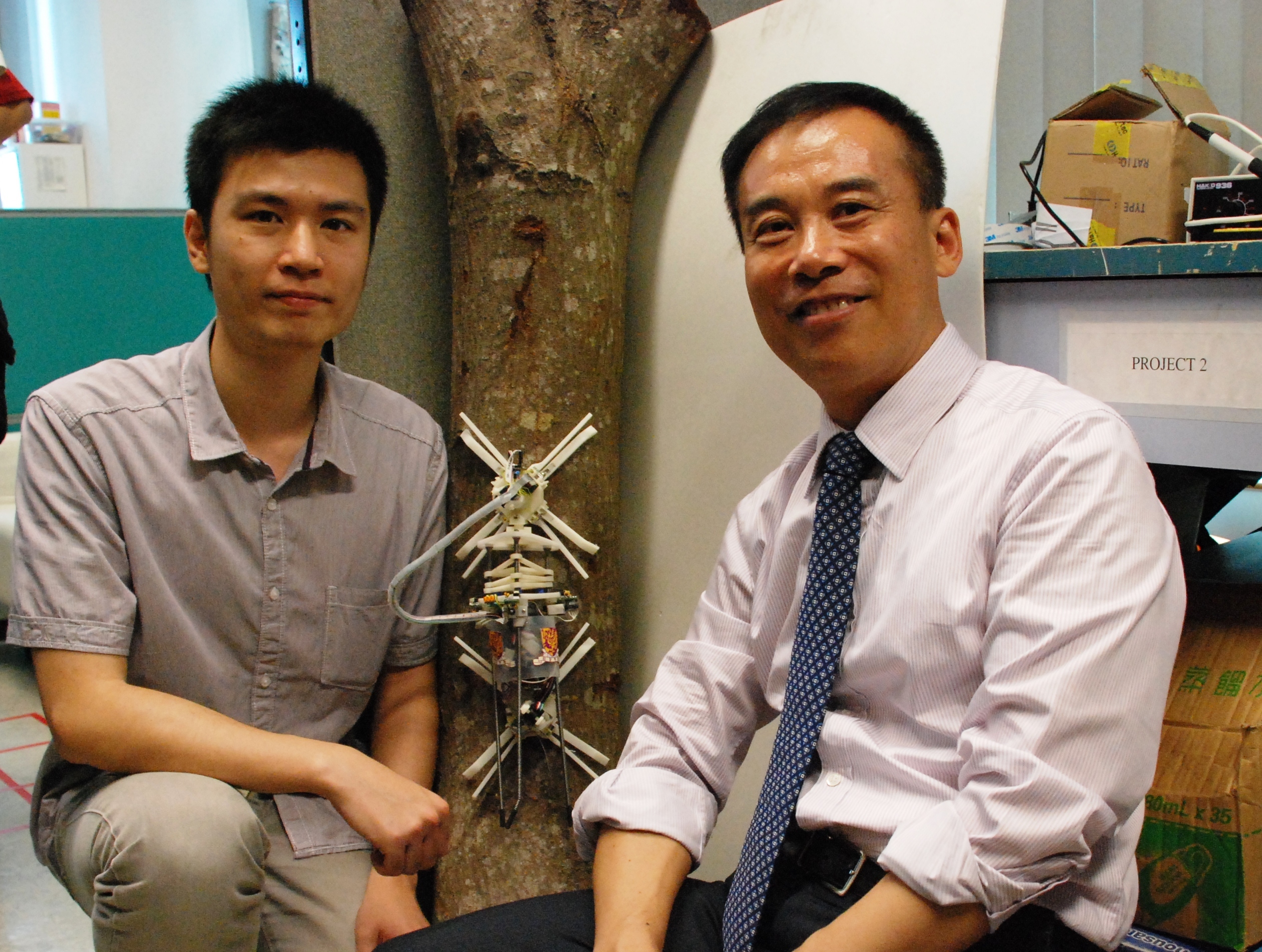
徐扬生教授(右)与林天麟博士于现代机器人实验室展示爬树机械人「爬树宝宝」
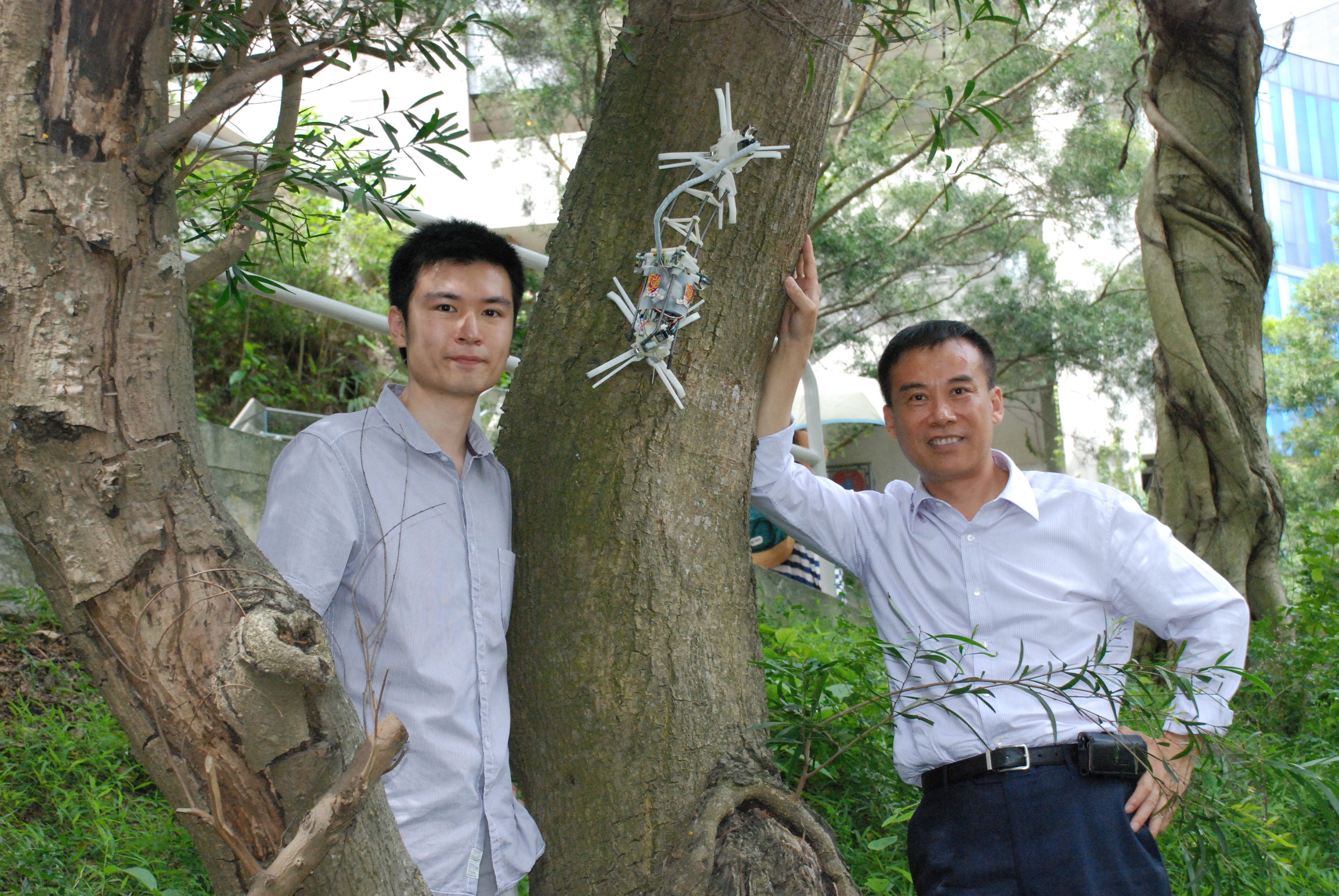
徐扬生教授(右)与林天麟博士

中大爬树机械人「爬树宝宝」