

中大新聞中心
中大研究團隊發明水空跨域巡航器原型機
香港中文大學(中大)機械及自動化工程學系陳本美教授及同濟大學上海自主智能無人系統科學中心陳杰教授共同領導的研究團隊,最近研發了一款水空兩棲巡航器原型機,名為「同濟飛魚」,它既可於空中飛行,亦可在水中暢遊探索水下環境。該項發明於今年2月初發布,有望成為各行業探索水底環境的重要工具。
可運用在搜救工作
「同濟飛魚」為全自動設計,航行時無須人手操作。在空中飛行時,其四個支臂會朝上以高速度旋轉。當它降落在水面,支臂就會朝下,並以較慢的速度旋轉,繼而將機身拉入水中。「同濟飛魚」擁有跨領域定位和導航系統,包括全球定位系統、慣性測量單元、深度計和迷你速度測數日誌,可全自動操作整個水陸兩棲的旅程,其用途廣泛,包括可運用於航空和水中勘測、遙距感應和災難搜救工作等。
與一般無人機相比,「同濟飛魚」的獨特之處在於機身每個支臂末端均配上一個設有變速箱的推進裝置,可以用兩種速度獨立旋轉,讓巡航器在水中或空中都可以達到最佳運行效果。而機身則與無人機類同,具備一個中央的圓頂形機身和四個附有電機或螺旋槳模組的支臂。
陳本美教授解釋:「在推進方面,雙速推進裝置可因應水空介質進行切換,提供足夠的推進力之餘,亦確保輸出效率。推進裝置圍繞支架臂旋轉以控制推力方向及力量,從而增強巡航器在水中的機動能力。」
充滿電後可在水底運作40分鐘
當「同濟飛魚」重量為1.63公斤,在充滿電的情況下可在空中飛行6分鐘,在水中巡游40分鐘,最深可去到水底3米,而在水中的最高速度為每秒2米。陳教授表示﹕「我們很高興可以展示『同濟飛魚』,這是我們研究工作的重要里程碑。我們簡化了其結構及減低重量,保證它在水空介質中都能順暢運行,我們期待它在未來能被廣泛應用。」
视频:
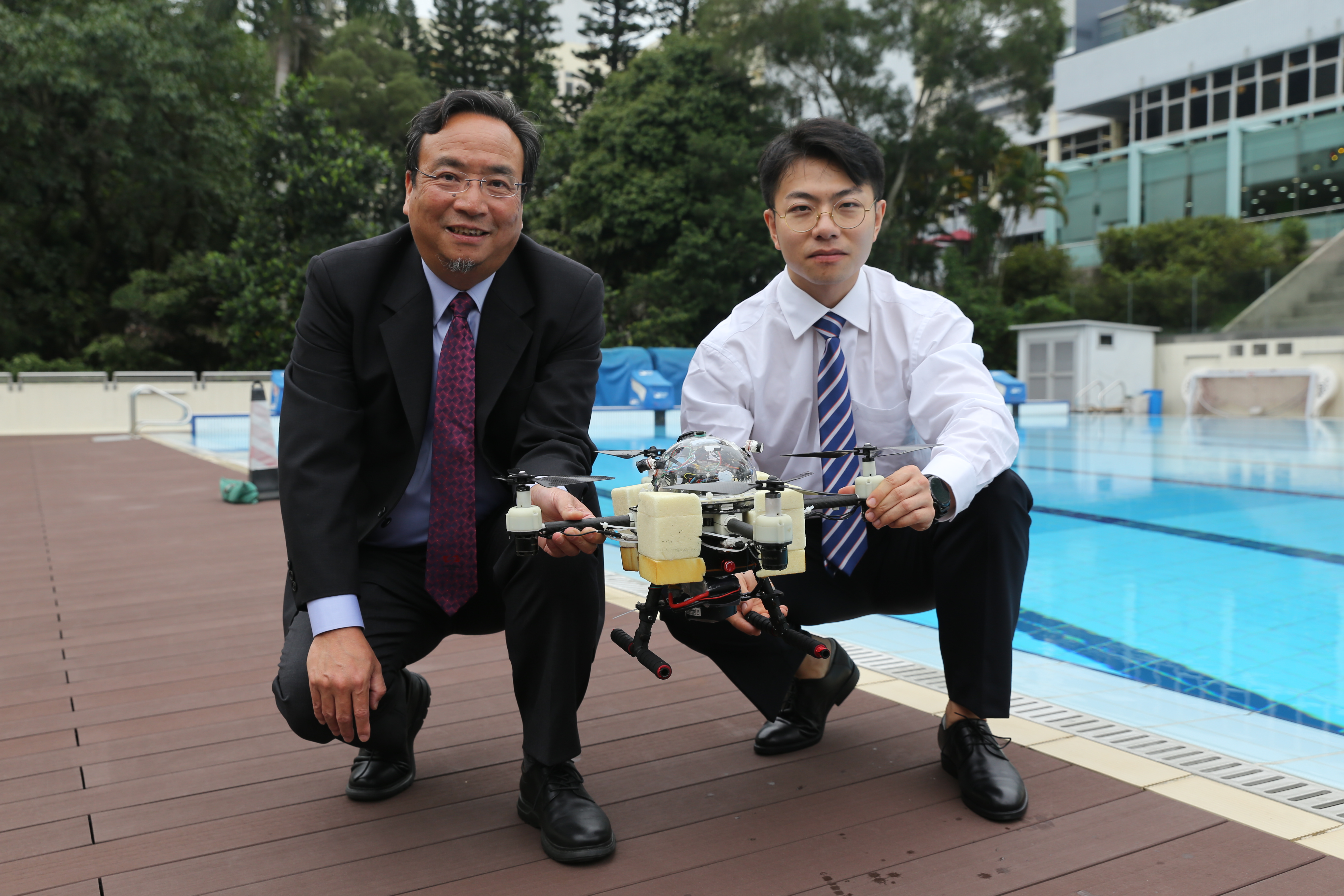
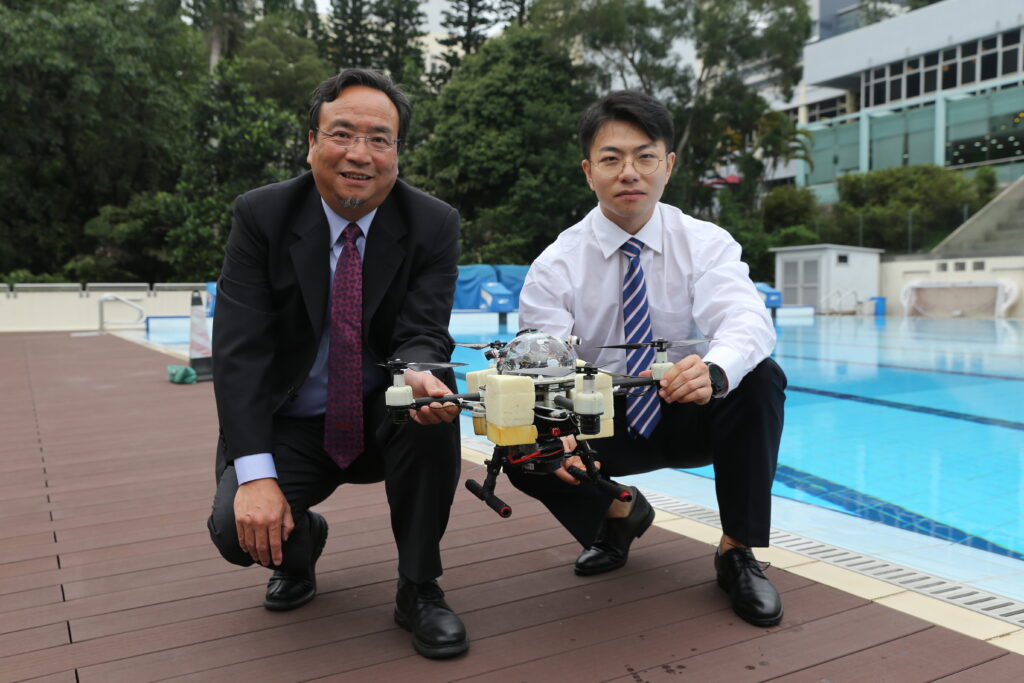
中大機械及自動化工程學系陳本美教授(左)及博士生劉昫辰介紹「同濟飛魚」。
陳本美教授與其團隊成員。
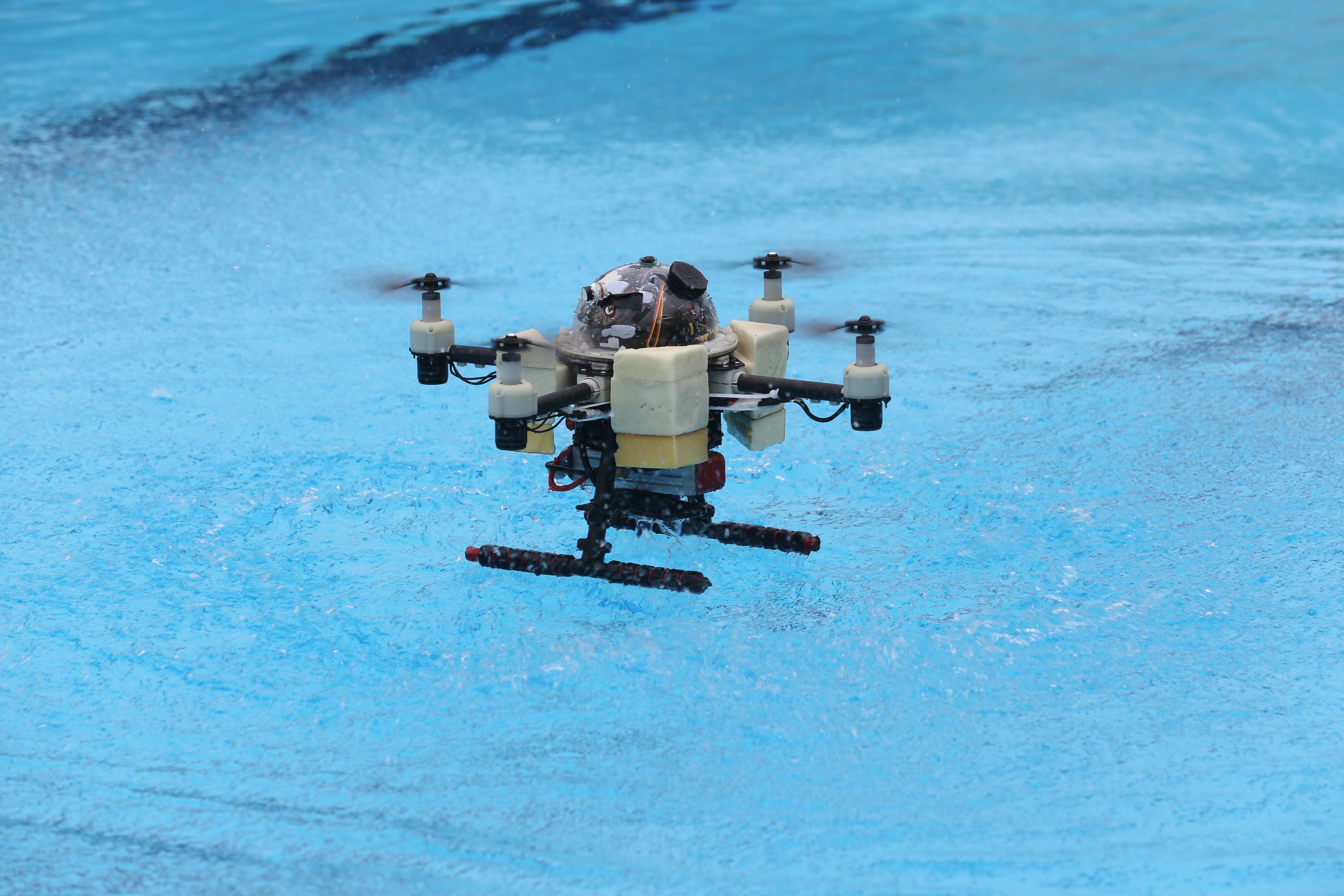
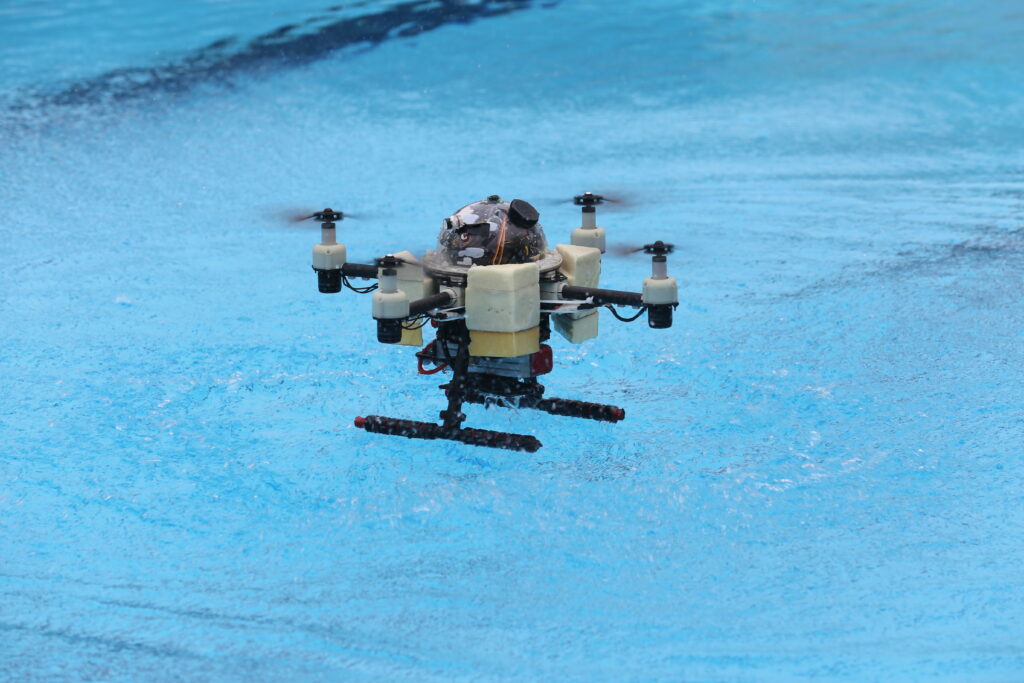
「同濟飛魚」為全自動設計,航行時無須人手操作。

「同濟飛魚」在水中的最高速度為每秒2米。