

CUHK
News Centre
Fish fins inspire new technology which could lead to softer more flexible robots
CUHK develops 3D soft architected materials with magnetic control dynamic morphological transformation
A collaborative research team led by Professor Zhang Li from The Chinese University of Hong Kong (CUHK)’s Department of Mechanical and Automation Engineering has developed a ferromagnetic silicone elastomer with three-dimensional (3D) deformability, further expanding new applications of morphable soft materials in various engineering fields, such as shaping more flexible soft robots. The research results have been published in the internationally renowned journal Nature Communications.
New technology breaks through the current limitations of deformation freedom
Soft materials are widely used in flexible electronic devices and smart systems due to their ability to bend and deform, including micro-antennas, smart adhesive devices and wireless near-field communication devices. At present, the general quasi-static control strategies for controlling the deformation of soft materials can only switch between two forms of morphological configurations including initial and deformed morphologies, and are unable to achieve a higher degree of freedom and more complex multi-form dynamic control, meaning the corresponding functionalities are limited.
Professor Zhang Li and Dr Jin Dongdong from CUHK Department of Mechanical and Automation Engineering, together with Professor Zhang Jiachen from the City University of Hong Kong and Professor Wang Liu from the University of Science and Technology of China, have developed a magnetic dynamic regulation strategy to address the limitations of the existing quasi-static regulation by using a magnetic field to control the transformation of soft materials.
The team attached the swellable magnetic elastomer they developed to a hard glass substrate and then immersed it in the organic solvent toluene. After toluene is absorbed by the elastomer, it diffuses inside it, causing swelling. Under the constraint of the substrate, the elastomeric structure undergoes a buckling transformation to form a 3D wave-like structure. A strong pulse magnetic field produced by a magnetiser is applied to magnetise the elastomers during the swelling process, followed by recovering to the undeformed state that sets the 3D anisotropic magnetisation profiles in the elastomeric structures. Programmed magnetic inputs including strengths, directions and gradients facilitate the realisation of multimodal dynamic regulation of morphable structures such as travelling wave-form transformations which are well beyond their quasi-static states.
A technology inspired by fish fins
Professor Zhang Li said, “Natural organisms often exhibit highly controllable morphological transformations to enhance their adaptability to the physical environment. For example, a variety of plants with wrinkled surfaces can modulate their hydration by changing their surface areas, while the knifefish ensures its locomotion is manoeuvrable and stable by regulating its wavy ribbon fins. Inspired by the wavy fins of knifefish that can buckle freely, we have developed a magnetic elastomer that can freely deform to achieve the multimodal transformation of 3D structures at different dimensional scales.”
Through the modulation of the driving magnetic field, the team enables the dynamic geometric reconfiguration of the magnetic elastomer to exhibit a series of switchable fluid properties such as directional flow, mixing and vortex, and showcases its potential applications in fluidic manipulation, selective object trapping, sensitivity-enhanced biomedical analysis, soft robotics and other fields. Professor Zhang Li’s team will further apply magnetic elastomers to their research on micro-robots, and explore related biomedical applications.
The project has been supported by the Research Grants Council (RGC), the HKSAR Innovation and Technology Commission (ITC), the Croucher Foundation, the CUHK T Stone Robotics Institute, the SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems, and the Multi-Scale Medical Robotics Center (MRC), InnoHK, at the Hong Kong Science Park.
The full text of the research paper can be found at: https://www.nature.com/articles/s41467-022-35212-6
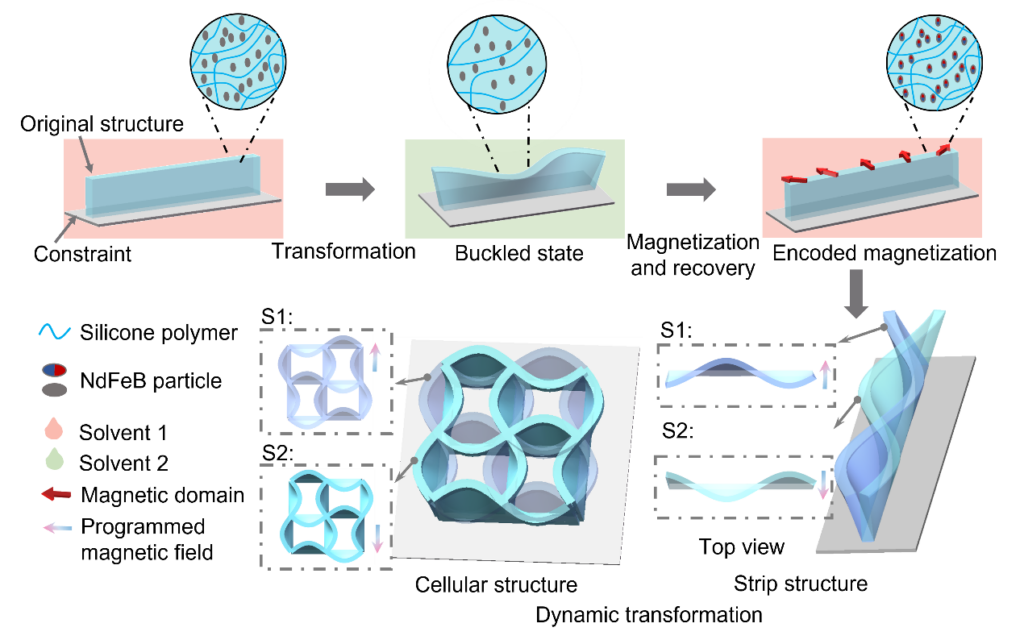

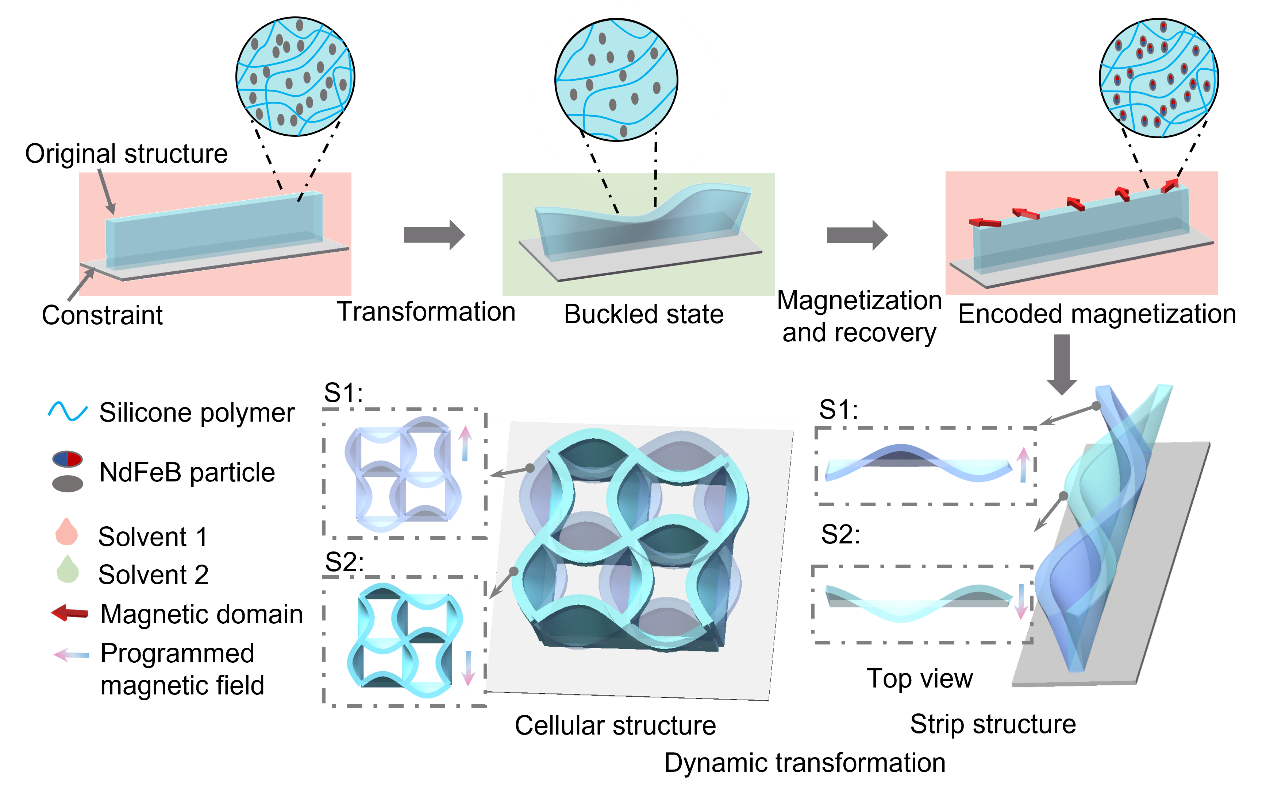
A schematic of dynamic transformation of magneto-elastomers. Diverse transformation of elastomeric structures could be achieved by using programmed magnetic inputs.
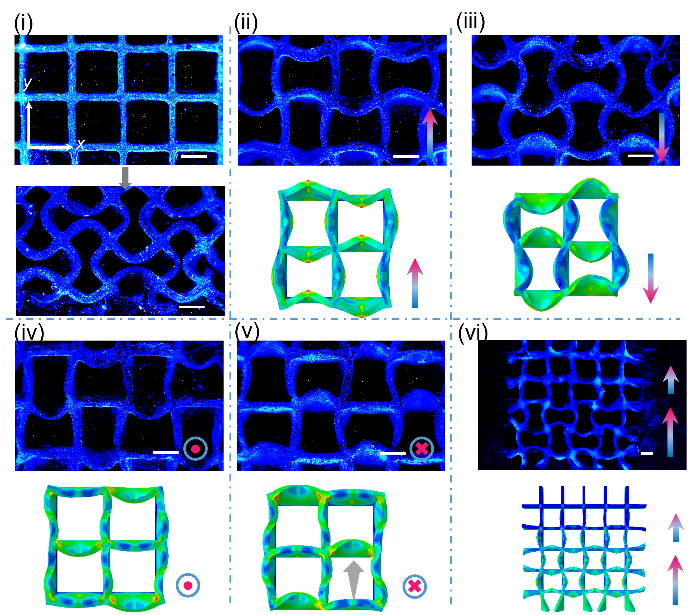
The image shows the geometric transformation of cellular structures and simulation results with different magnetic field inputs.
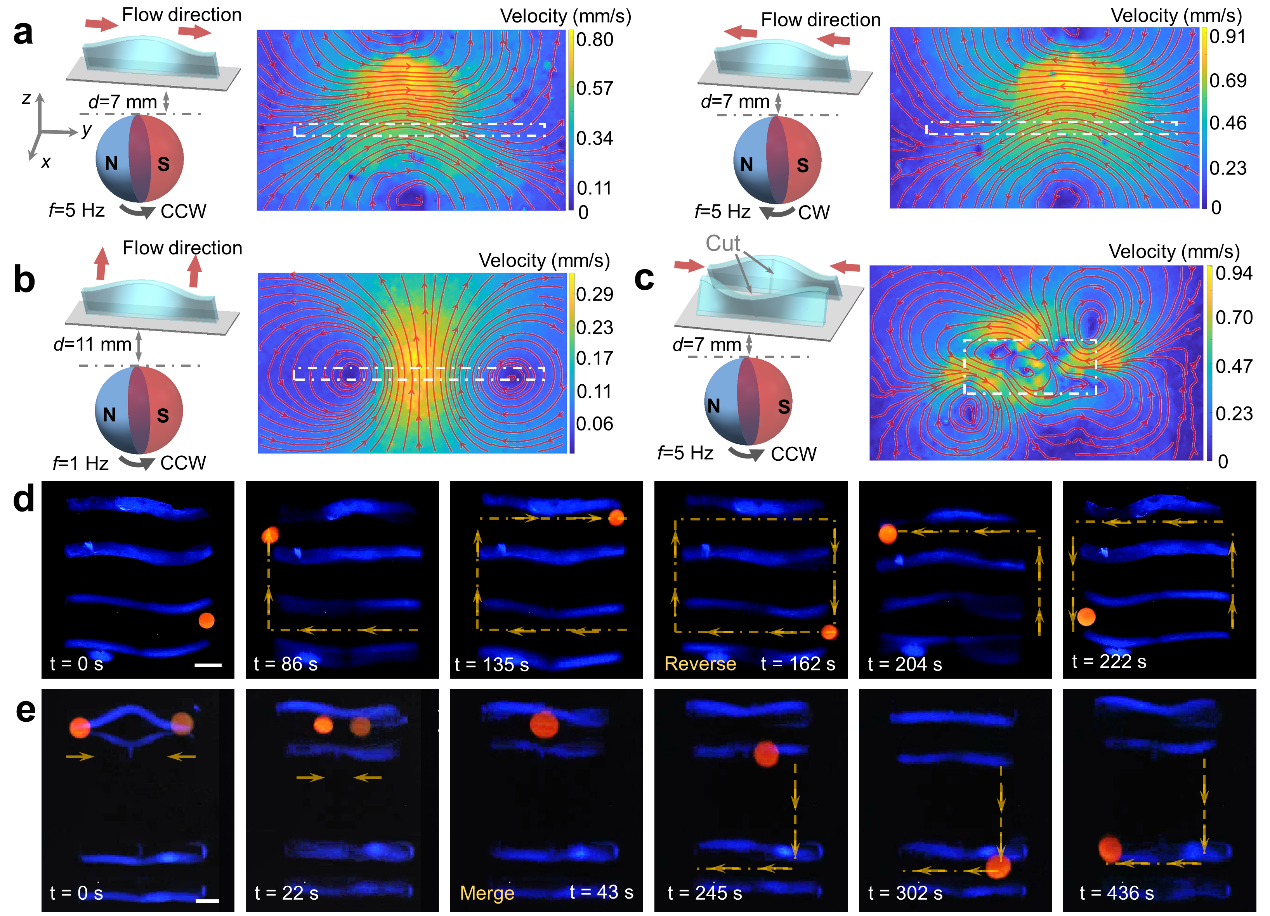
Switchable fluidic behaviours generated by the dynamic transformation of the strip structures. Flow field induced by single strip structure under different magnetic field strength and rotating direction (images a, b); Flow field induced by two strip structures with symmetric shape-morphing results (image c); Demonstration of droplet manipulation with the dynamic flow field generated by the multiple strip structures (images d, e).