CUHK
News Centre
CUHK builds diversified miniature soft machines with ferrofluids based on their three wetting characteristics
- The ferrofluids have greater deformation capabilities and exhibit a variety of motion modes by magnetic actuation
- The miniature soft machines utilise three different wetting characteristics of ferrofluids and broaden the biomedical applications
Professor Zhang Li, Professor in the Department of Mechanical and Automation Engineering Department at The Chinese University of Hong Kong (CUHK), has developed multifunctional miniature machines using the three wetting[1] characteristics of ferrofluids, which not only have more robust deformation capabilities but can also exhibit a variety of motion modes, further expanding the prospects for applications of miniature soft machines in biomedicine. Study results have been published in the international journal Nature Communications and featured on its Editors’ Highlights website “Applied physics and mathematics”.
Amoeba-like soft machines capable of dramatically changing shape, splitting and coalescing could be transformative for real-world applications. Such systems are promising candidates for biomedical applications such as targeted drug delivery, minimally invasive surgery, cell transplantation and medical catheters.
Why “ferrofluid” soft machines?
Magnetic, small-scale soft machines are often produced by adding hard magnetic micron particles to soft condensed matter such as hydrogels. However, their limited deformability makes it difficult for miniature machines to navigate in narrow and confined spaces, such as tiny lumens with opening dimensions comparable to or much smaller than the machine. It is therefore necessary to explore new materials to build miniature soft-bodied machines with new functions.
Professor Zhang has collaborated with Professor Carmel Majidi from Carnegie Mellon University, using the three different wetting characteristics of ferrofluids and their high shape reconfigurability to build diversified soft machines that can perform a variety of functions.
What is a ferrofluid?
A ferrofluid is a liquid made of nanoscale ferromagnetic or ferrimagnetic particles suspended in a fluid. In a low-wetting state, the magnetic field can be used to drive the ferrofluid to exhibit a variety of motion modes – stretch, jump, rotation, tumble, kayak and wobble, or to change shape, split and merge like an amoeba. Ferrofluids can adapt to complex terrain, such as crossing repeated obstacles and stairs, and passing through tiny holes in walls. Their droplets can be reconstituted into liquid capsules to transport liquid or solid cargo to a target location in narrow passages such as bile ducts.
Benefits of building miniature soft machines based on different ferrofluid wetting characteristics
In a high-wetting state, ferrofluid droplets can act as arrays of artificial liquid cilia[2]: that is, eyelash-like long protrusions from the substrate, which are able to swing rhythmically like microbial cilia under the action of an external magnetic field, and can be deformed to transport biological fluids controllably, such as pumping blood. In a total wetting state, the droplets can reconstitute into artificial liquid skins, like in the sci-fi movie Venom, by sticking to the surface of inanimate objects, converting them into controllable machines.
In its future work, Professor Zhang’s research team will focus on the control of substrate-wetting properties to achieve switchable adsorption and detachment of ferrofluid “skin”. The introduction of external stimuli-responsive fluids in soft machines not only increases functionality and adaptability but also opens up new directions for the development of miniature intelligent soft robots.
Full text: “Exploiting ferrofluidic wetting for miniature soft machines”
Acknowledgements
The research is financially supported by the Hong Kong Research Grants Council (RGC), the ITF project funded by the HKSAR Innovation and Technology Commission (ITC), the Croucher Foundation Grant, Chow Yuk Ho Technology Centre for Innovative Medicine, and the CUHK T Stone Robotics Institute. The authors would also like to thank the Multi-Scale Medical Robotics Centre (MRC under InnoHK) at the Hong Kong Science Park, and the SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems for their support.
[1] Wetting is the ability of a liquid to maintain contact with a solid surface, resulting from intermolecular interactions when the two are brought together. The degree of wetting is determined by a force balance between adhesive and cohesive forces.
[2] Plural form of cilium; they are slender threadlike projections that extend from the surface of the substrate.
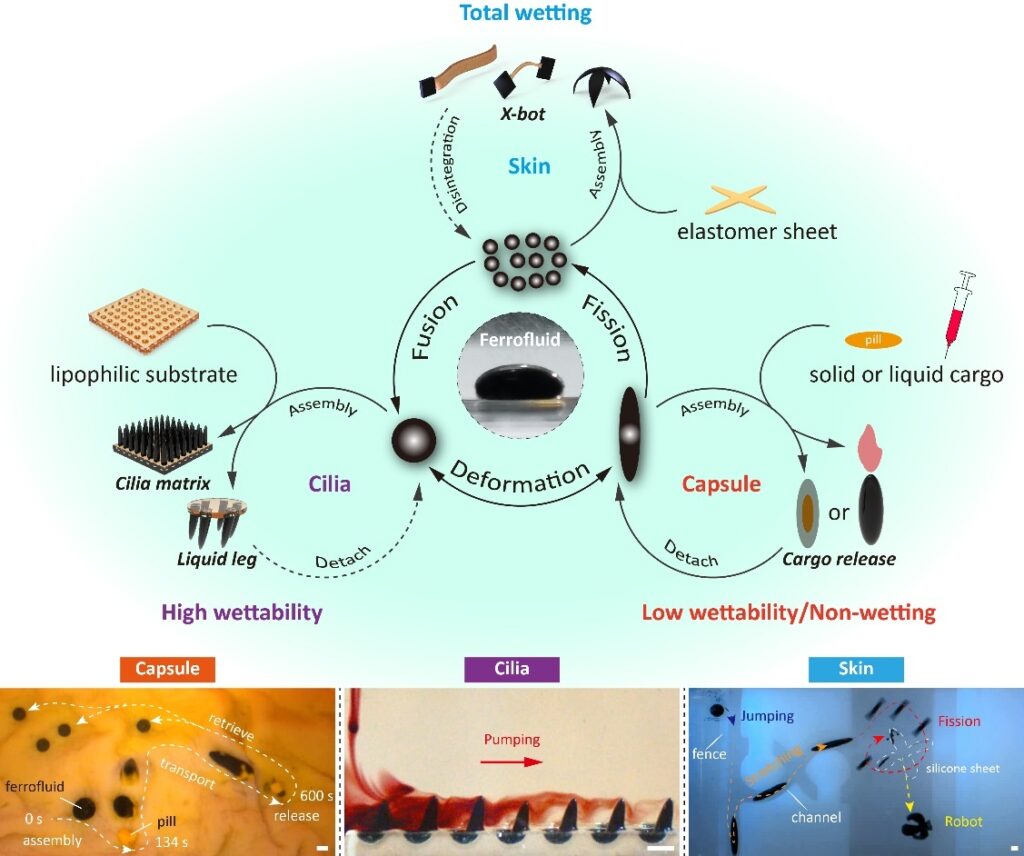
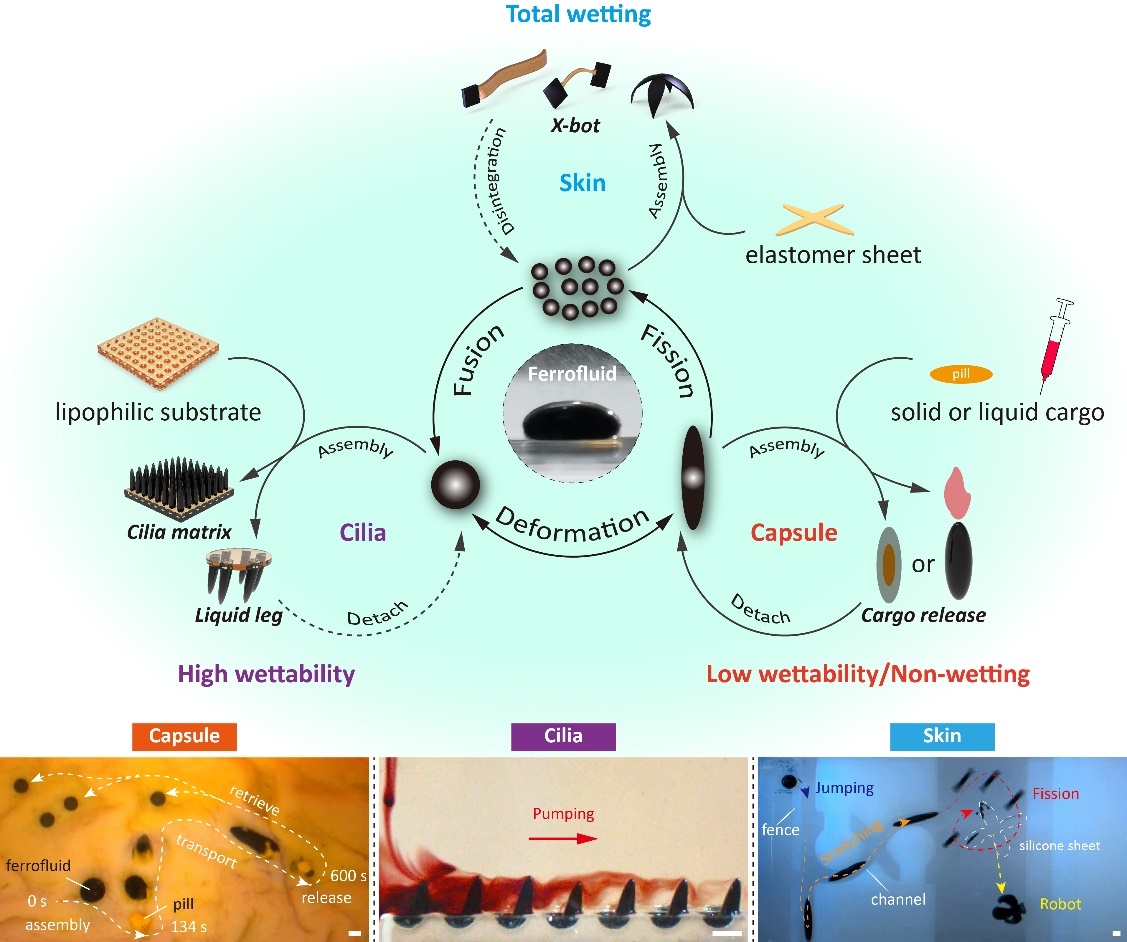
Schematic and experimental snapshots showing the versatility of ferrofluid droplets with three different wetting characteristics, serving as liquid capsules (low wetting), wireless liquid cilia (high wetting) and wireless liquid skin (total wetting), respectively.
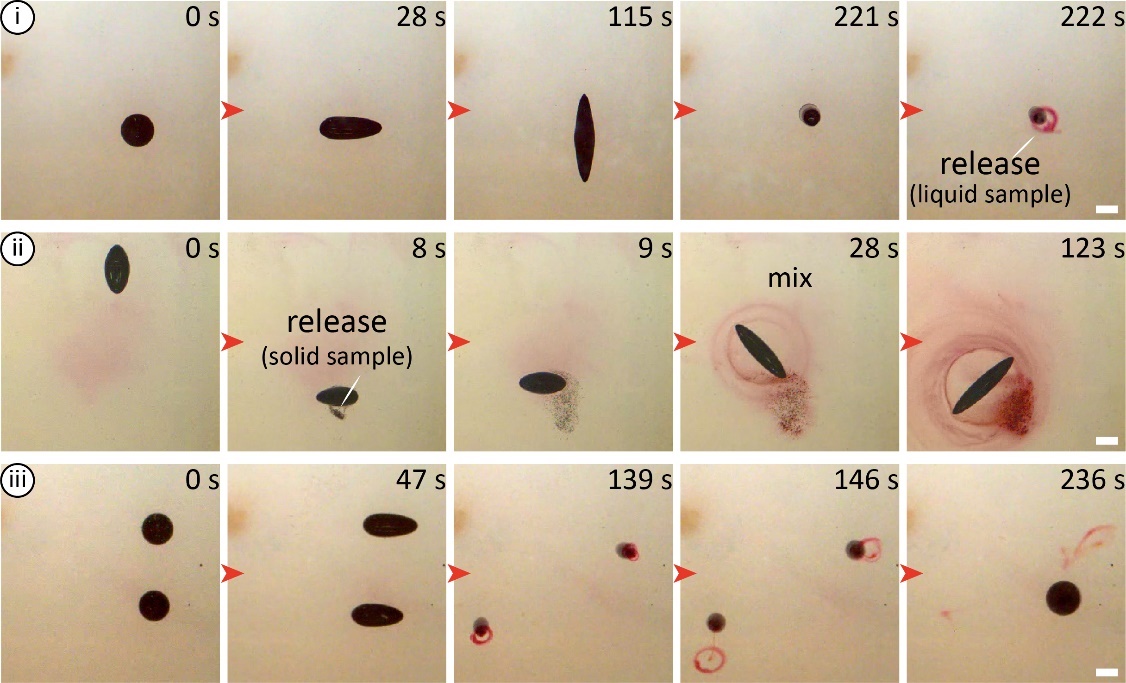
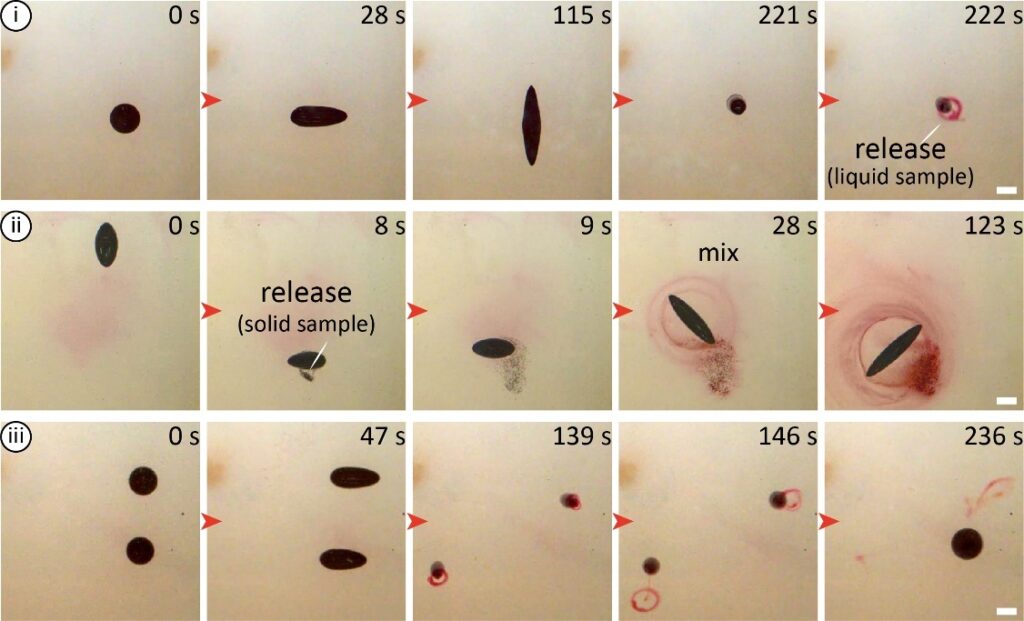
Liquid capsules, based on low ferrofluidic wetting, manoeuvre in various motion modes while carrying a liquid or solid cargo and releasing it on demand. (i) Liquid cargo delivery. (ii) Solid cargo delivery and mixing. (iii) Two liquid capsules are actuated together to deliver the liquid cargo and fuse. The substrate is made of hydrogel.
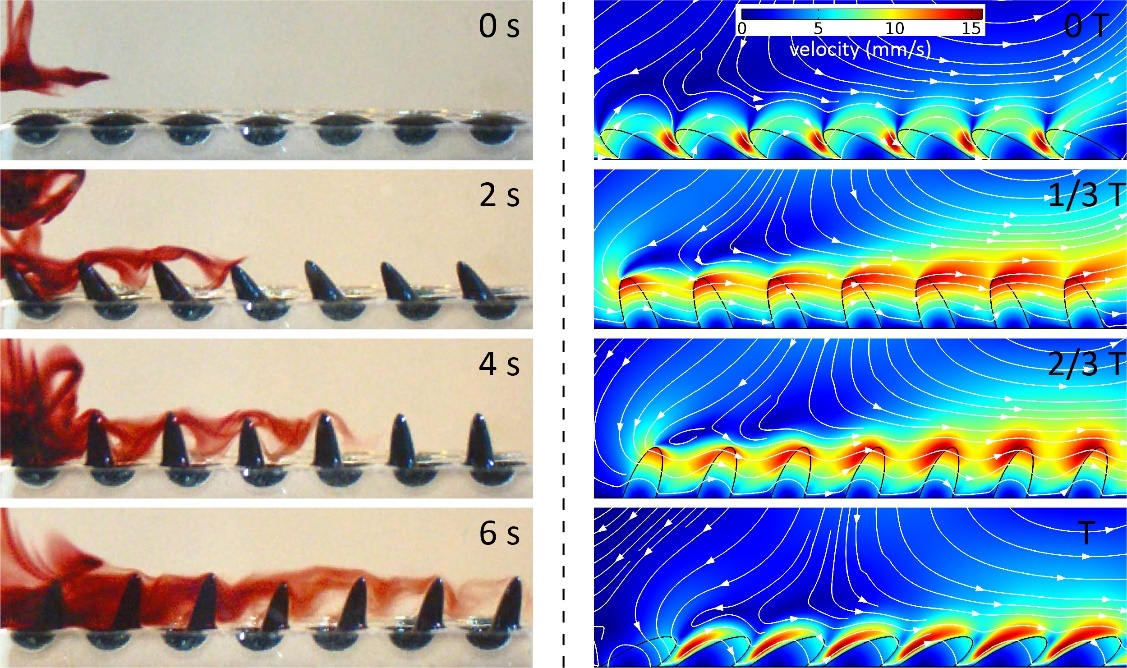
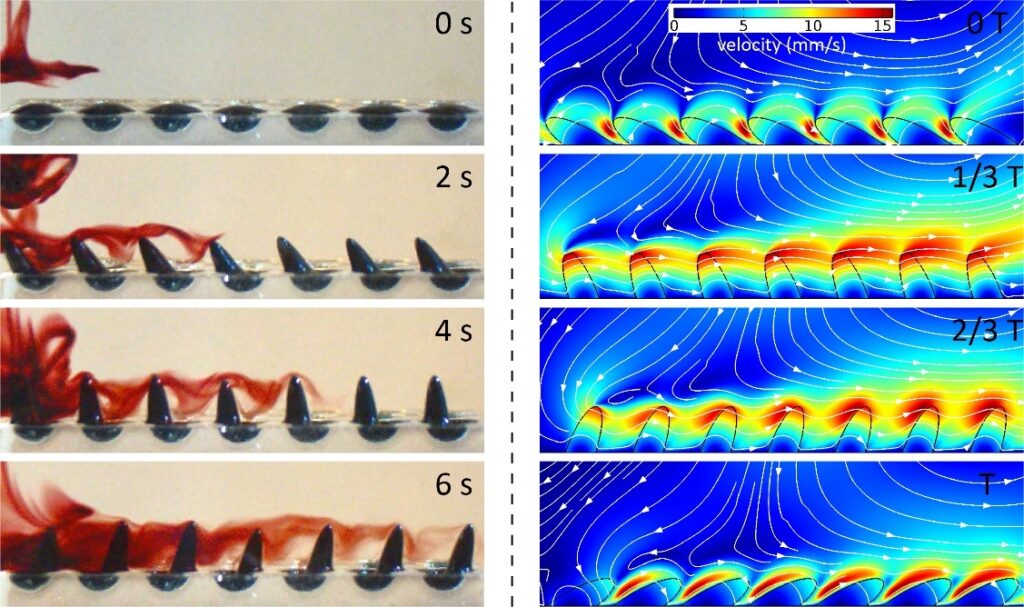
Experimental and simulated results of the controlled fluid pumping from left to right using artificial liquid cilia array (based on high ferrofluidic wetting) with synchronous waves.
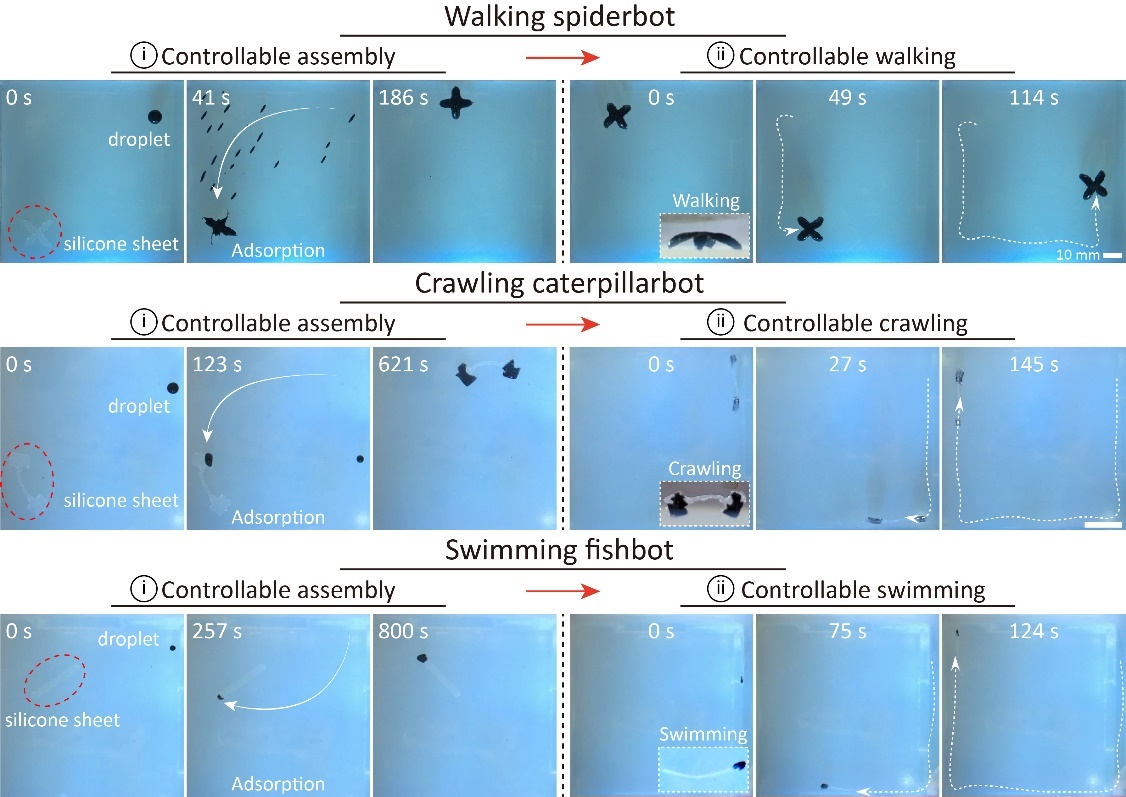
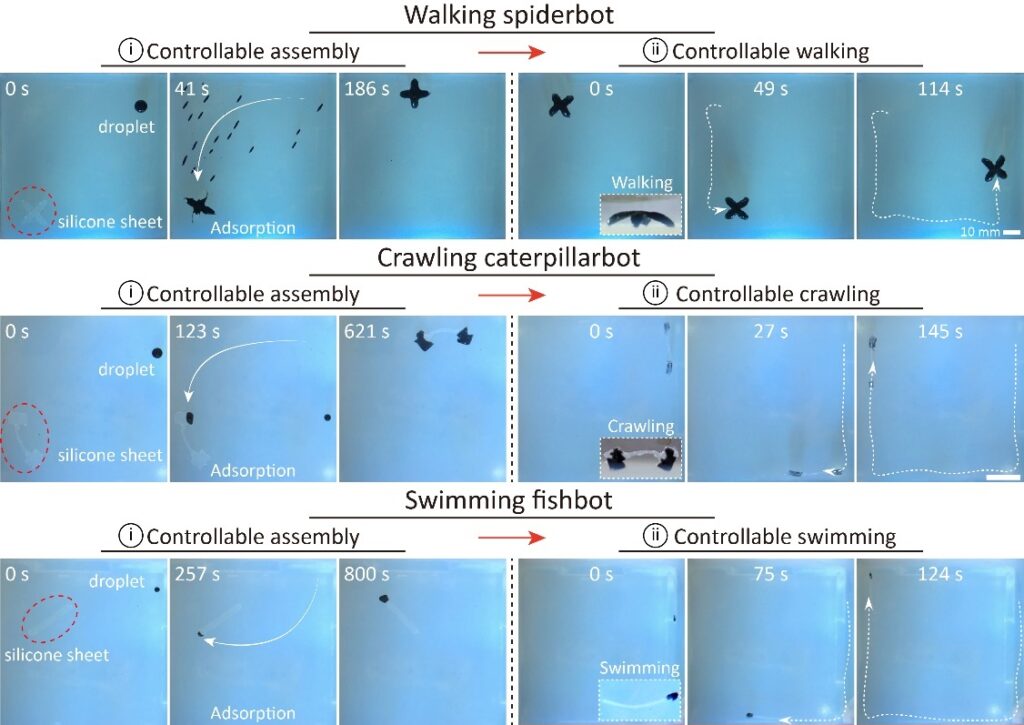
Artificial liquid skin, based on total ferrofluidic wetting, converts silicone elastomer to miniature soft machines.