CUHK
News Centre
CUHK and ETH Zurich successfully conduct world’s first in vivo teleoperated magnetic endoscopy using an animal model, over a distance of 9,300 km between Zurich and Hong Kong
The Chinese University of Hong Kong (CUHK)’s Faculty of Medicine (CU Medicine) and the Swiss Federal Institute of Technology Zurich (ETH Zurich), Switzerland, have conducted the world’s first in vivo teleoperated magnetic endoscopy using a porcine model, performing a biopsy of the stomach wall. Two operators controlled the procedure: a clinician in the operating room in Hong Kong and a remote expert at an operator console in Zurich, 9,300 kilometres (km) away. This study highlights the capabilities and future potential of this novel technology, facilitating immediate diagnostic and surgical care in remote areas, particularly for specialised procedures where local expertise is not available. Study details have been published in Advanced Intelligent Systems.
Procedure performed in tandem by operators in Hong Kong and Zurich over a geographical distance of 9,300 km
In a teleoperated system, the operator controls and monitors the system from a controller console, and a robotic agent translates their commands into actions in the operating room. There must be a reliable, high-speed network connection between these two.
In their study, CU Medicine and ETH Zurich used a bedside server computer that established wired communication with Navion, a clinically ready and portable magnetic navigation system, and with a magnetic endoscope and the robotic system. An operator used a console in Zurich to interact with the robotic system which was 9,300 km away physically over the internet. Communication between the operator console and the robotic system was established through a WebSocket, a computer communications protocol that facilitates real-time data transfer from and to the server.
The robotic platform used in this study is installed in the Hybrid Operating Room at the Multi-Scale Medical Robotics Center (MRC), one of CUHK’s InnoHK Centres established as part of the Hong Kong government’s InnoHK initiative. The MRC Hybrid Operating Room is a one-of-its-kind facility in Asia that is fully dedicated to research, development and preclinical evaluation of new surgical robots and medical devices. ETH Zurich is one of MRC’s overseas collaborating institutions.
Retroflexion and tissue biopsy show the system’s performance is comparable to standard devices
During the study, an operator in Zurich controlled the endoscope in Hong Kong from their local computer while monitoring the video feed. Post-operative X-ray imaging showed that the endoscope achieved full retroflexion within the model stomach, meaning it was able to perform a U-turn. In this procedure, retroflexion was an important milestone, as large bending angles can pose a challenge for magnetic endoscopes and successful retroflexion proves that magnetic endoscopes can move as freely as standard devices. In addition, stomach wall tissue was biopsied, and the tissue size was found to be suitable for further analysis.
Dr Shannon Melissa Chan, Assistant Professor in the Department of Surgery at CU Medicine, stated: “Teleoperated endoscopy offers not only remote surgical training and mentoring but also immediate diagnostic and surgical care in remote areas, particularly when local expertise is lacking. A remote expert can even instruct trained nurses to perform the procedures. Millions of patients worldwide will be able to be diagnosed and treated for gastrointestinal cancer in a timely manner as endoscopic technology becomes more accessible.”
Professor Dr Bradley Nelson, Director of the Multi-Scale Robotics Lab, Head of the Institute of Robotics and Intelligent Systems, ETH Zurich, added: “In the next step of our research, we will be performing tele-endoscopy on a human stomach. In addition to endoscopic procedures, such as cancer screening, there is a lot of potential for this technology. This includes its application to other areas of the gastrointestinal tract, to the neurovascular system and in foetal surgery.”
Professor Philip Chiu, Dean of CU Medicine and Shun Hing Education and Charity Fund Professor of Robotic Surgery, concluded: “Teleoperated procedures could greatly enhance access to healthcare by creating a network of robotic platforms, which would facilitate the global dissemination of surgical expert knowledge and expertise. The collaboration between CU Medicine and ETH Zurich serves not only as a synergistic platform to facilitate innovation in medical practices but also illustrates the institutions’ expertise in clinical translation and direct patient benefits.”



CU Medicine and the Swiss Federal Institute of Technology Zurich (ETH Zurich), Switzerland, have conducted the world’s first in vivo teleoperated magnetic endoscopy using a porcine model, performing a biopsy of the stomach wall.
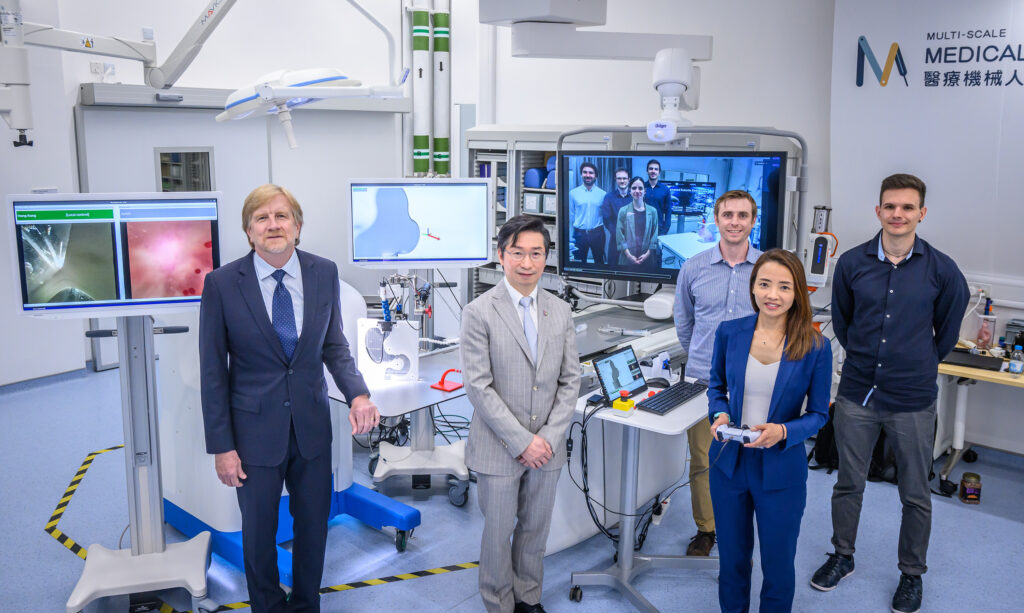
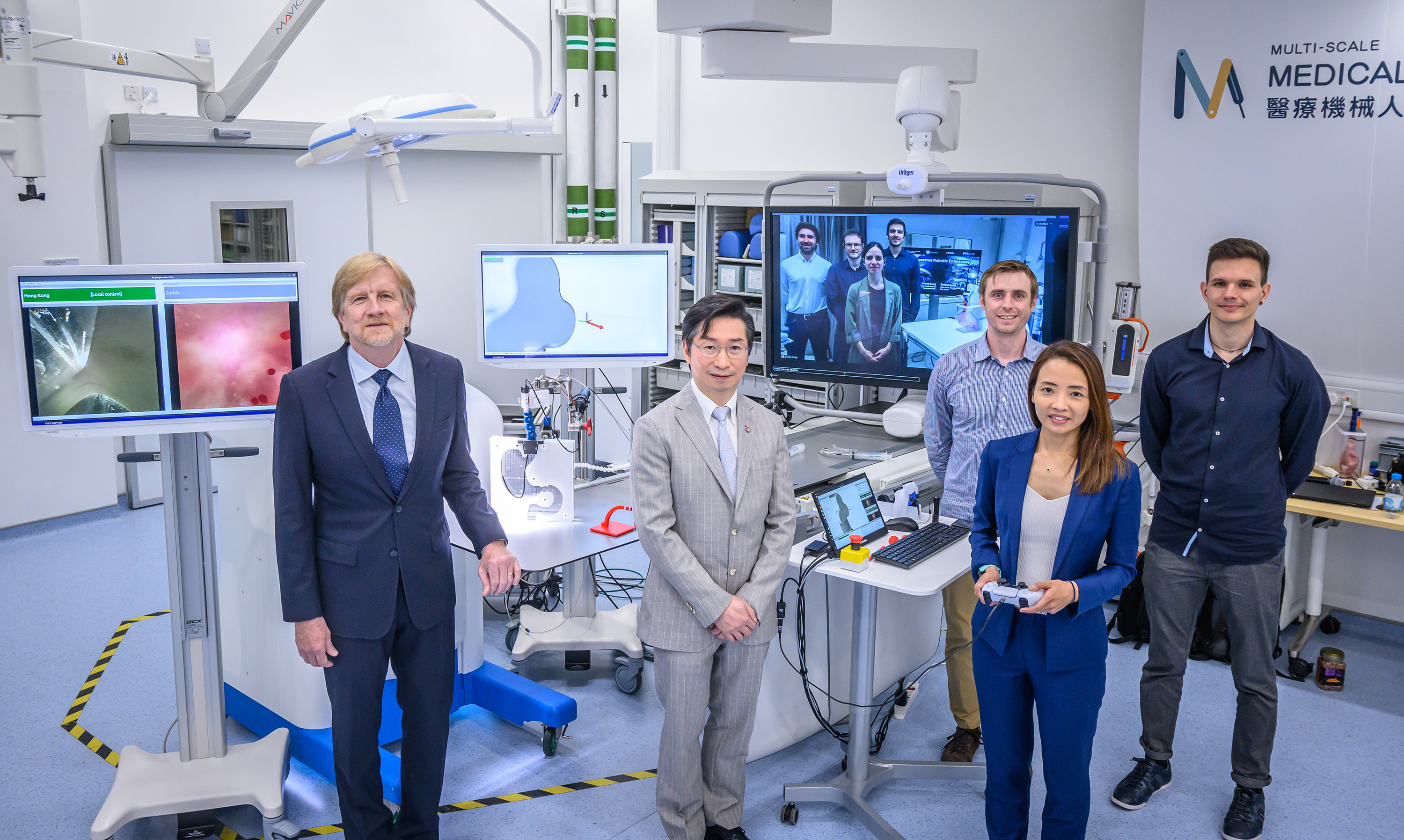
Research team members include Professor Philip Chiu, Dean of CU Medicine and Shun Hing Education and Charity Fund Professor of Robotic Surgery (2nd from left), Dr Shannon Melissa Chan, Assistant Professor in the Department of Surgery at CU Medicine (2nd from right); Professor Dr Bradley Nelson, Director of the Multi-Scale Robotics Lab, Head of the Institute of Robotics and Intelligent Systems, ETH Zurich (1st from left), and his team.

Featured is Dr Shannon Chan in Hong Kong with a joystick, remotely operating the teleoperated magnetic endoscopic system at ETH Zurich in the Switzerland, 9,300km away from Hong Kong. She demonstrates the mock procedure of biopsy with a plastic model of the stomach, monitoring it live on the computer screen.

The TV screen on the right shows the ETH Zurich team in Switzerland remotely operating the teleoperated magnetic endoscopic system at the Hybrid Operating Room in Hong Kong’s Multi-Scale Medical Robotics Center. The computer screen on the left displays the endoscopic image inside the stomach model.

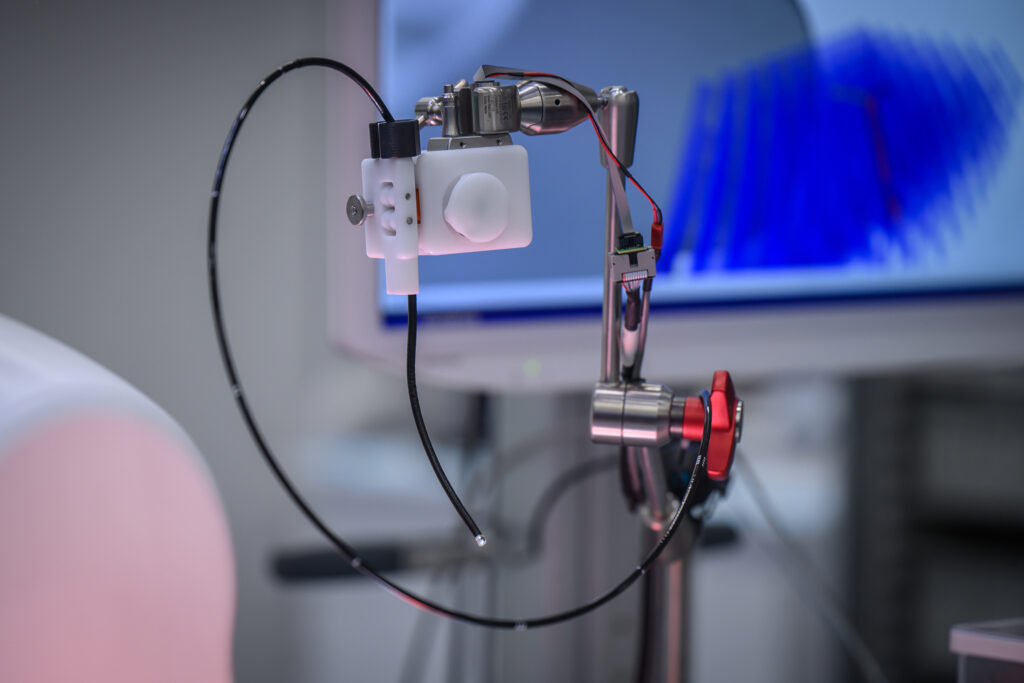
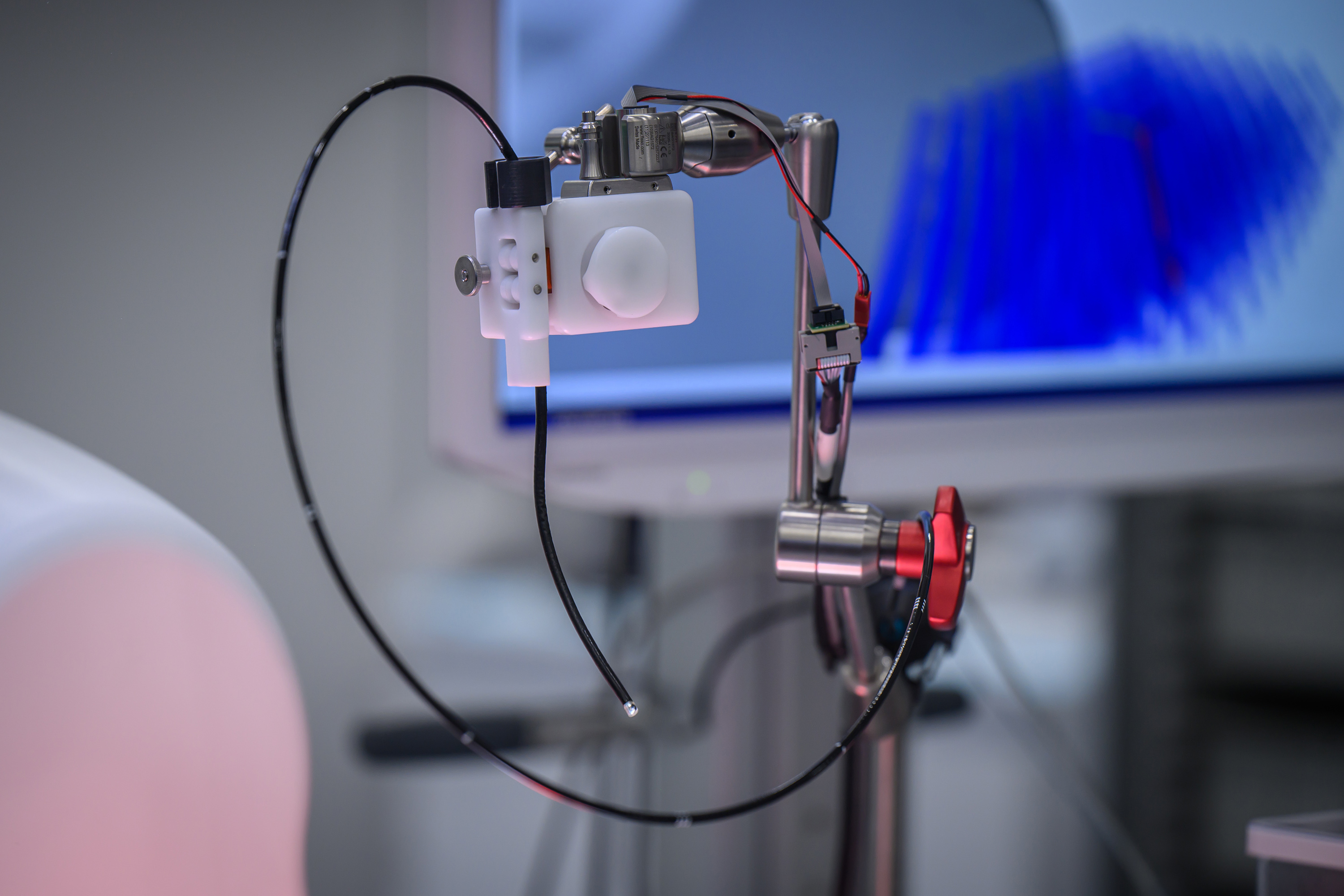
It is an important milestone for an endoscope to achieve full retroflexion, meaning it is able to perform a U-turn. Large bending angles can pose a challenge for magnetic endoscopes and successful retroflexion proves that magnetic endoscopes can move as freely as standard devices.
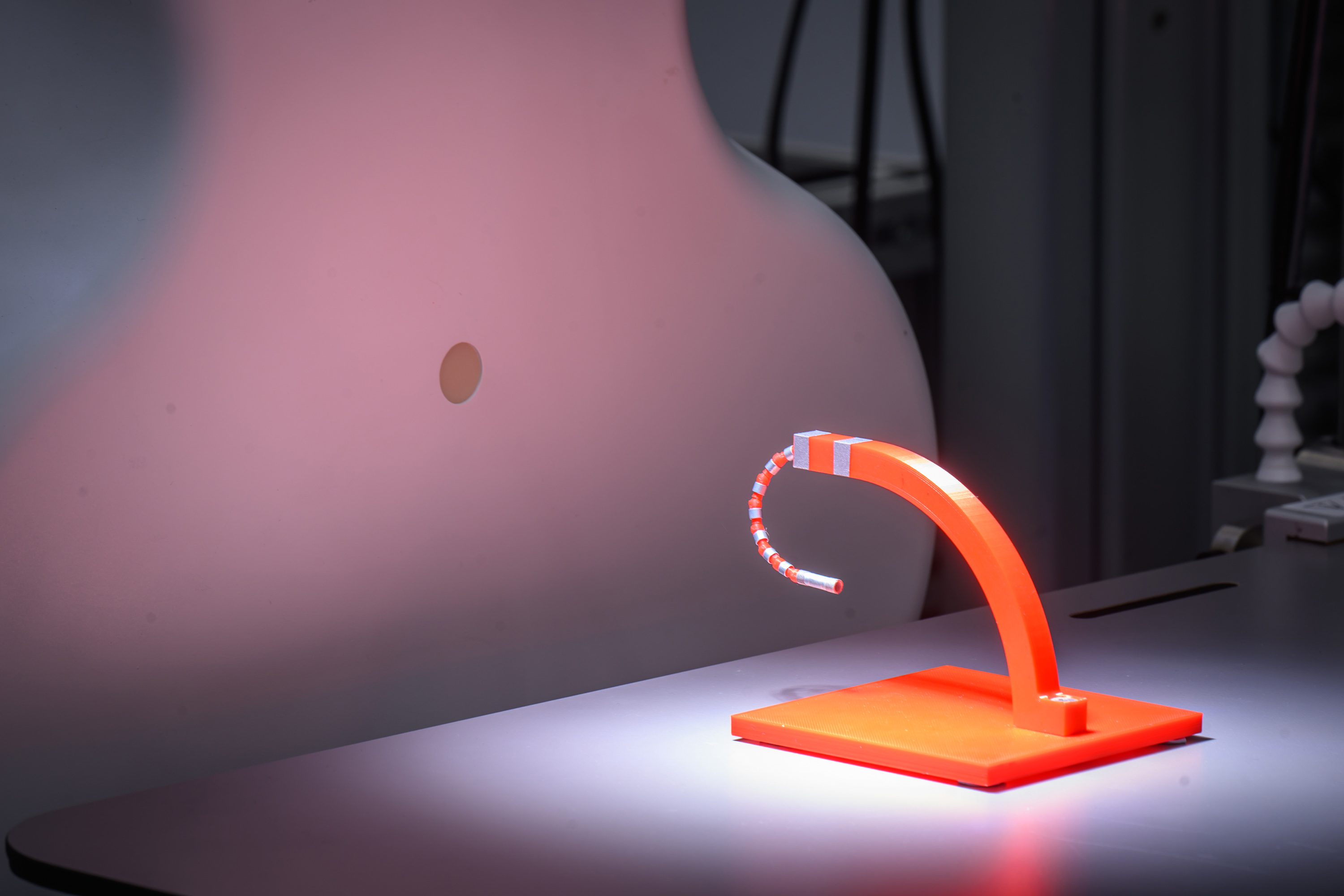
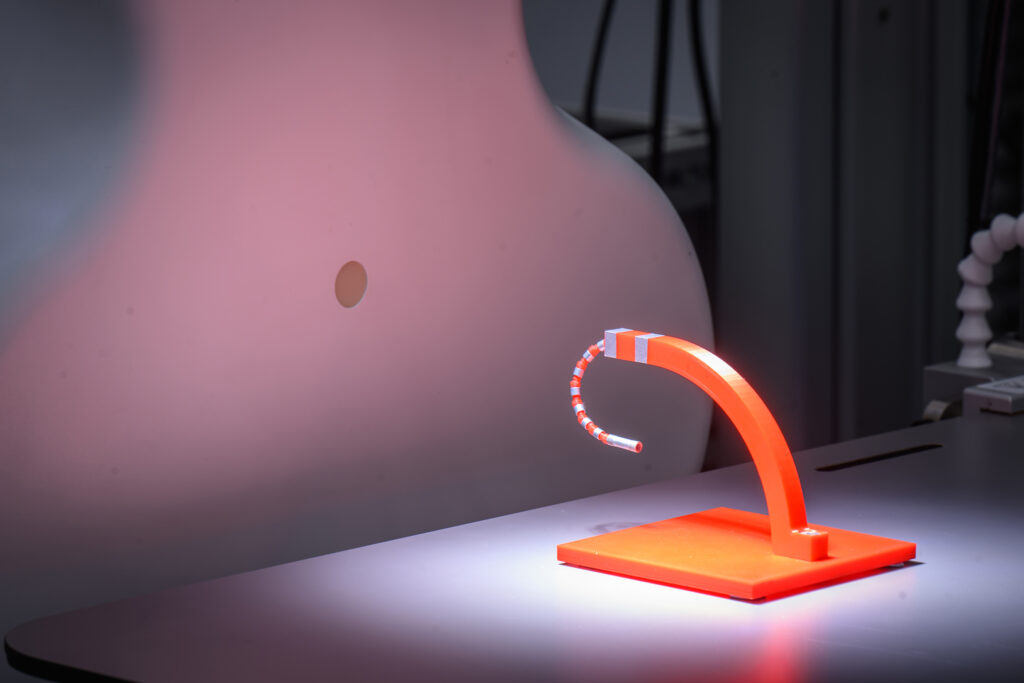
This picture shows the prototype of the magnetic endoscope. The endoscope is made up of small pieces of magnets and tiny beads as the skeleton, which allows it to move and bend without challenge under magnetic guide.
The magnetic endoscope.